フィジカルAIニュース(2026/3/20号)

更新日:2026/3/20
エグゼクティブサマリー
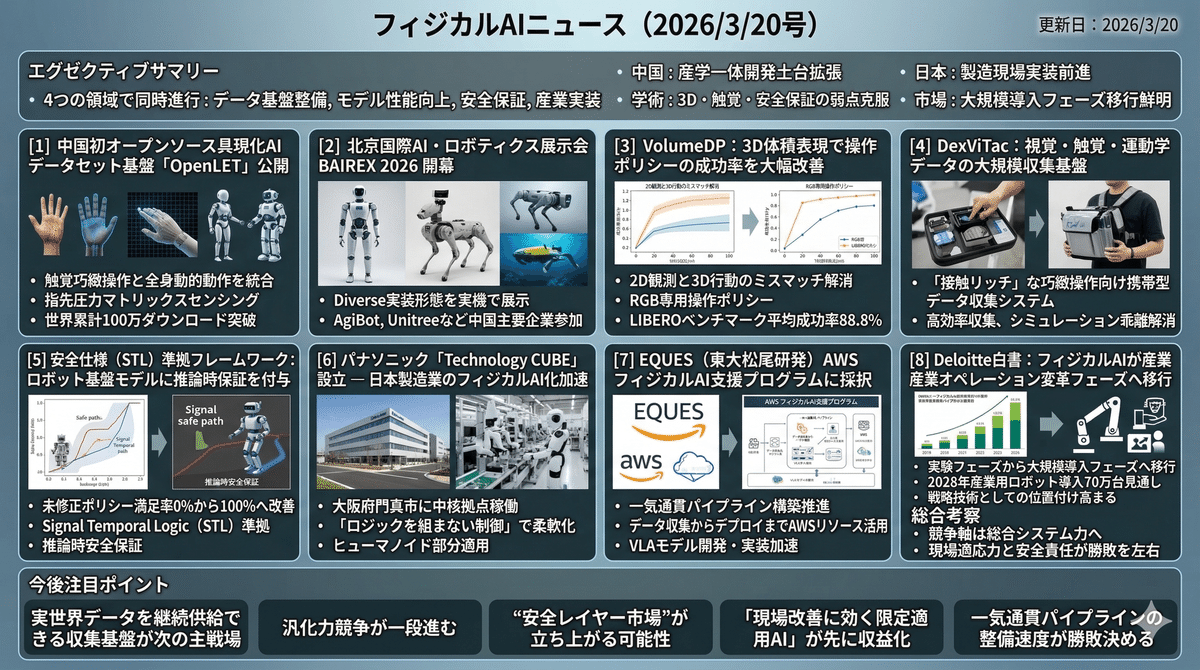
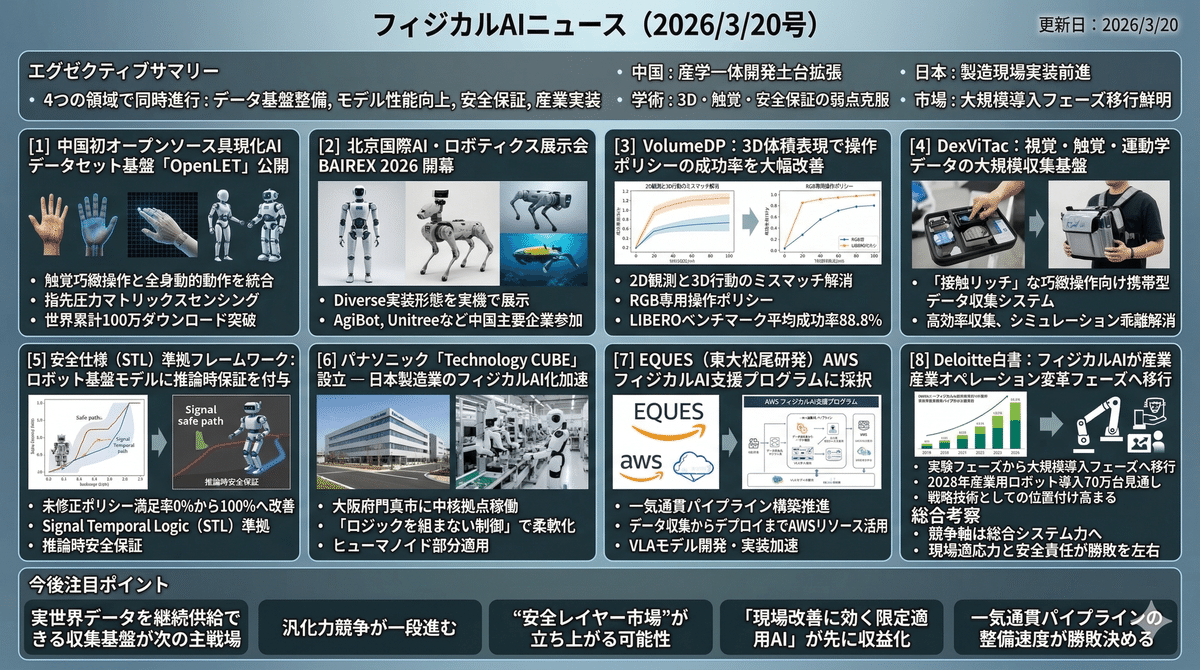
2026/3/19のフィジカルAIは、データ基盤整備、モデル性能向上、安全保証、産業実装の4領域で同時進行。中国ではOpenLET公開やBAIREX開催を通じ、産学一体でロボット開発の土台を拡張。研究面ではVolumeDPやDexViTacが3D認識と触覚収集の弱点を補い、実世界性能を押し上げた。さらにSTL準拠フレームワークが推論時安全保証を示し、日本ではパナソニックやEQUESが製造現場実装を前進。市場全体も大規模導入フェーズへの移行が鮮明になっている。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ 中国初のオープンソース具現化AIデータセット基盤「OpenLET」公開
出典:Pandaily — OpenLET報道
Leju Roboticsを中心に上海交通大学・ハルビン工科大学・Unitree Roboticsなど産学コンソーシアムが、触覚巧緻操作と全身動的動作を統合した「OpenLET」データセットを公開。指先圧力マトリックスセンシングと6軸力覚フィードバック(±0.5%精度)を組み合わせ、41関節の制御信号を含む117のアトミックスキルをカバー。LETデータセットシリーズは世界累計100万ダウンロードを突破しており、産学共同のデータ共有インフラ整備を通じて中国のロボット開発競争加速戦略が鮮明になっている。
2️⃣ 北京国際AI・ロボティクス展示会 BAIREX 2026 開幕
出典:BAIREX 公式サイト
北京・朝陽ホールにて35,000㎡・600社超が集結するロボティクス展示会が2026-03-18に開幕(〜03-20)。ヒューマノイド武術デモ・四足ロボット障害物走行・水中救助ロボット・中医学AIスマート診断など多様な実装形態を実機で展示。AgiBot・Unitreeなど中国主要企業が参加し、中国ロボティクス産業の現在地を示す業界横断イベントとして注目を集めた。
3️⃣ VolumeDP:3D体積表現で操作ポリシーの成功率を大幅改善
出典:arXiv — VolumeDP論文
2D観測と3D行動のミスマッチを、体積表現(Volumetric Representation)・空間トークン生成・マルチトークンデコーダの3モジュールで解消するRGB専用操作ポリシー「VolumeDP」を提案。LIBEROベンチマークで平均成功率88.8%を達成し、最良ベースライン比+14.8%・Diffusion Policy比+16.4%を記録。ManiSkillでも平均成功率68.9%(最良ベースライン比+19.3%)を実現し、カメラ視点・照明・背景などの分布ずれを含むOOD設定でも一貫した優位性を示した。
4️⃣ DexViTac:視覚・触覚・運動学データの大規模収集基盤
出典:arXiv — DexViTac論文
触覚を含む「接触リッチ」な巧緻操作に向けた人間中心の携帯型データ収集システムを提案。2,400件以上のデモを248デモ/時超の高効率で収集し、4つの高難度タスクで平均成功率85%超を実現。触覚データはシミュレーションとの乖離が大きい領域だが、実世界デプロイを前提とした収集システムの完成はロボティクス研究のデータボトルネック解消に直結する。
5️⃣ 安全仕様(STL)準拠フレームワーク:ロボット基盤モデルに推論時保証を付与
出典:arXiv — Specification-Aware論文
再学習不要でSignal Temporal Logic(STL)で与えた時相仕様(時間窓・順序・常時安全)を満たすよう行動分布を最小変更する推論時フレームワーク。AI2-THOR上の200試行で未修正ポリシーのSTL満足率0%を提案法が100%に改善(Case 1/2)。ロボット基盤モデルの弱点である安全・仕様遵守の保証を「推論時」に付与できる点が、実運用・責任分界の観点から特に重要。
6️⃣ パナソニック「Technology CUBE」設立 — 日本製造業のフィジカルAI化加速
出典:パナソニック公式Stories
パナソニック ホールディングスが大阪府門真市に研究・開発の中核拠点「Technology CUBE」を2026年4月に本格稼働させる。生産設備の立ち上げや変更を「ロジックを組まない制御」で柔軟化するフィジカルAIの部分適用を推進し、設備転用など現場対応力の向上を目指す。ヒューマノイドロボットの本格投入には時間を要するとしながらも長期視野に位置づけ、生産技術をグループ内に閉じず社外との共創でオープン化する戦略を鮮明化した。
7️⃣ EQUES(東大松尾研発)AWS フィジカルAI支援プログラムに採択
出典:Exciteニュース — EQUESプレスリリース
東京大学松尾研究室発のAIスタートアップEQUESが、AWSジャパン主催の「フィジカルAI開発支援プログラム」に採択された。データ収集から前処理・モデルトレーニング・シミュレーション・実環境デプロイまでの一連パイプライン構築を、AWSの計算リソースと技術支援で推進し、日本国内のVLAモデル開発・実装を加速。グローバルAIインフラを活用して国内スタートアップがフィジカルAI実装に挑む先行事例として注目される。
8️⃣ Deloitte白書:フィジカルAIが産業オペレーション変革フェーズへ移行
出典:Deloitte白書 PR Newswire
デロイトが発表した白書「Physical AI: The moment of acceleration」によれば、フィジカルAIは実験フェーズから大規模導入フェーズへ移行した。2024年の産業用ロボット導入数は50万台超で、2028年には70万台に達する見通し。現在、広範な統合を行っている企業は3%に過ぎないが2年以内に18%まで拡大が見込まれ、consumer・ライフサイエンス・ヘルスケア分野(22%)での採用が最も高いと予測。企業の競争優位性を左右する戦略技術として位置付けが高まっている。
総合考察
2026/3/19が示す本質は、フィジカルAIの競争軸が「高性能な単体モデル」から「データ、制御、安全、導入体制を含む総合システム力」へ移っている点にあるところが見える。中国はオープンデータと展示会を通じて開発者と企業の接点を増やし、研究成果の社会実装速度を高めている。一方で学術側は3D表現、触覚、仕様準拠といった実運用の難所を着実に攻略しつつある。日本勢も製造設備の柔軟化やクラウド活用によって追随を強めており、今後はモデル精度の優劣だけでなく、現場適応力と安全責任を誰が握るかが勝敗を左右する。
今後注目ポイント
OpenLETやDexViTacの流れが示すのは、次の主戦場がアルゴリズム単体ではなく「実世界データを継続供給できる収集基盤」だという点であり、ここを握る企業が事実上の標準を取りにいく可能性が高い。
VolumeDPのような3D体積表現が安定成果を出し始めたことで、今後はVLAや拡散系ポリシーでも「2D入力から3D整合をどう作るか」が性能差の中心論点になり、汎化力競争が一段進む。
STL準拠の推論時保証は、基盤モデル時代のロボットにおける責任分界を整理する重要技術であり、今後は保険、監査、規制対応と結び付いた“安全レイヤー市場”が立ち上がる可能性がある。
パナソニックのようにヒューマノイド全面投入ではなく、既存設備へ部分適用する姿勢は現実的で、短中期では「万能ロボット」より「現場改善に効く限定適用AI」が先に収益化しやすい。
Deloitte白書とEQUES事例を合わせて見ると、今後の成長を決めるのは研究成果そのものよりも、学習、シミュレーション、クラウド、実機導入をつなぐ一気通貫パイプラインの整備速度になりそうだ。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #2026年
- #AWS
- #Panasonic
- #ロボティクス
- #フィジカルAI
- #ヒューマノイド
- #製造業DX
- #AI最新情報
- #2026年3月
- #PhysicalAI
- #STL
- #Deloitte
- #embodiedaI
- #EQUES
- #AgiBot
- #OOD汎化
- #Libero
- #ロボット基盤モデル
- #安全保証
- #スマート製造
- #VLAモデル
- #UnitreeRobotics
- #スマートマニュファクチャリング
- #上海交通大学
- #東京大学松尾研究室
- #四足ロボット
- #全身制御
- #クラウドロボティクス
- #触覚センシング
- #巧緻操作
- #DiffusionPolicy
- #実装加速
- #産業オペレーション変革
- #設備柔軟化
- #TechnologyCUBE
- #AI2THOR
- #推論時制約
- #SignalTemporalLogic
- #SpecificationAware
- #接触リッチ操作
- #データ収集基盤
- #視覚触覚学習
- #DexViTac
- #ManiSkill
- #VolumetricRepresentation
- #3D体積表現
- #VolumeDP
- #水中救助ロボット
- #北京ロボティクス展示会
- #BAIREX2026
- #力覚フィードバック
- #ハルビン工科大学
- #LejuRobotics
- #OpenLET




