フィジカルAIニュース(2026/3/16号)

更新日:2026/3/16
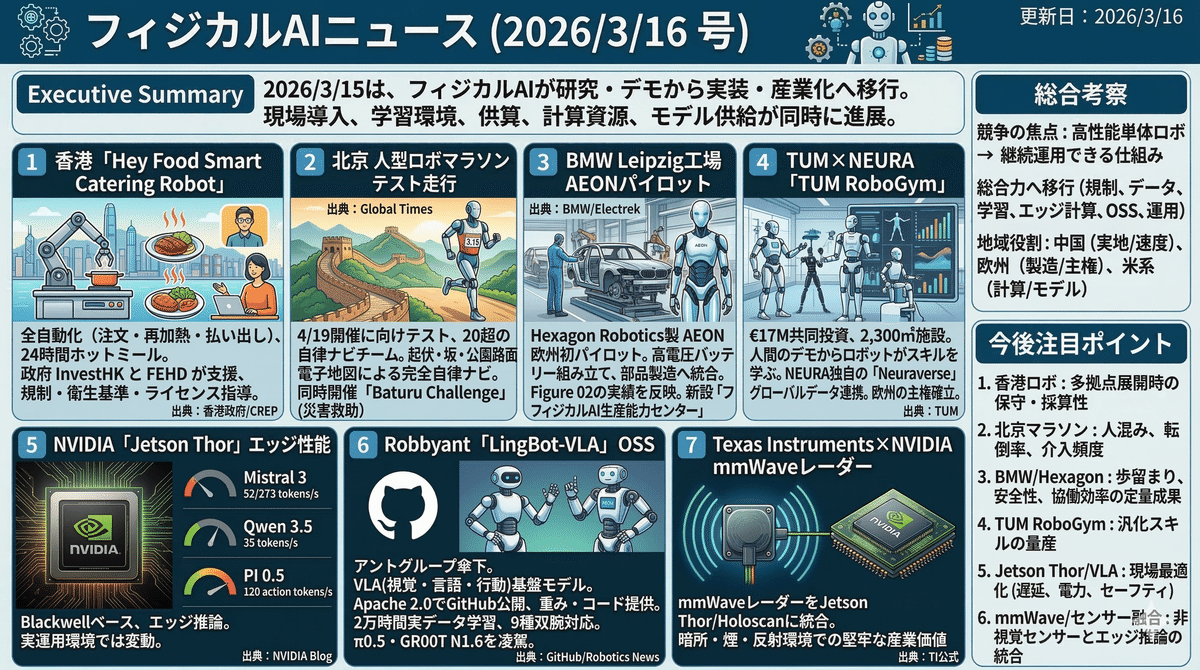
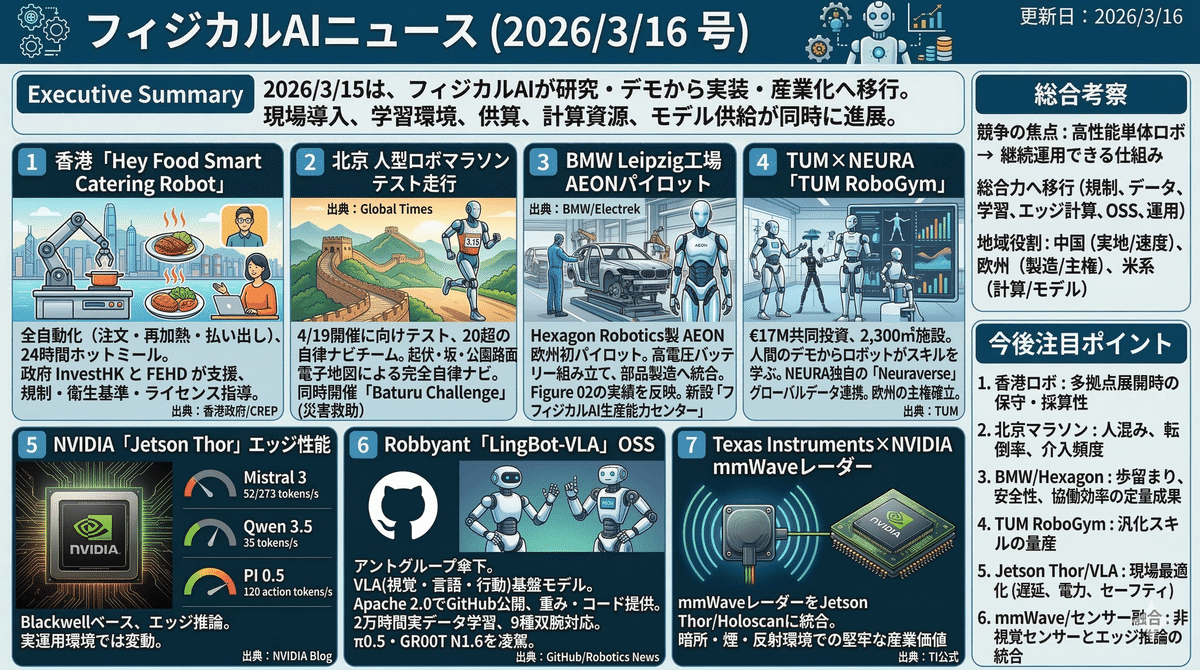
エグゼクティブサマリー
2026/3/15は、フィジカルAIが研究やデモの段階を越え、実装と産業化の局面へ入りつつあることが見える内容がある。香港では政府支援の下、注文から再加熱、払い出しまでを自動化した飲食ロボットが24時間ホットミール提供を開始し、規制対応まで含めた一次情報として重い。北京では人型ロボットが起伏ある屋外コースで自律走行を試され、BMWは欧州工場でヒューマノイド導入を加速する。さらにTUMとNEURAは大規模訓練拠点を整え、NVIDIAはJetson Thorの性能を公表、RobbyantはVLA基盤モデルをOSS公開。現場導入、学習環境、計算資源、モデル供給が同時に前進し、Physical AIの産業化を支える土台が急速に揃ってきたことが今回の核心である。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ 香港初の「Hey Food Smart Catering Robot」公式ローンチ
出典:香港政府プレスリリース / CREP公式
香港政府の発表によると、InvestHK と食物環境衛生署(FEHD)が、CREP による香港初の「Hey Food Smart Catering Robot」立ち上げを支援しました。システムは注文・再加熱・払い出しを全自動化し、24時間のホットミール提供を行います。加えて、FEHD が法令要件・衛生基準・営業ライセンス取得に関するガイダンスを行ったことまで明記されており、飲食分野のフィジカルAI実装として一次情報の強い事例です。 (香港特別行政区政府网站)
2️⃣ 北京・人型ロボットハーフマラソン、初回テスト走行を実施
出典:Global Times
Global Timesによると、2026年4月19日開催予定の北京E-Town人型ロボット・ハーフマラソンに向けて、3月15日深夜に初回テスト走行が実施されました。登録参加チームの中から20超の自律ナビチームが参加し、今年は坂・起伏・公園内路面が追加。電子地図による完全自律ナビの比重が高まったほか、人間ランナーとの同時スタート(別レーン)形式も採用。新サブイベント「Baturu Challenge」(災害救助17タスク)も同時開催予定。情報源は主催者が同紙に送った声明ベース。
3️⃣ BMW Leipzig工場、Hexagon「AEON」の欧州初パイロット導入
出典:BMW Group プレスリリース / Electrek
BMWグループは2026年、Leipzig iFACTORYで欧州初のヒューマノイドロボット・パイロットプロジェクトを始動。Hexagon Robotics製AEONを採用し、高電圧バッ テリー組み立てや部品製造への段階的統合を進める。2025年12月に初テスト完了済みで2026年夏に本格パイロット移行予定。米スパルタンバーグ工場でFigure 02 がBMW X3を3万台超の製造を支援した実績を踏まえ、Physical AIの欧州展開を加速。社内知見集約のため「フィジカルAI生産能力センター」も新設した。
4️⃣ TUM×NEURA Robotics、「TUM RoboGym」を設立
出典:TUM公式
TUM公式(2026年3月10日)によると、TUM MIRMIとNEURA Roboticsは€17M(NEURA€11M+TUM分)を共同投資し、ミュンヘン空港近接のTUM Convergence Centreに2,300㎡の施設「TUM RoboGym(powered by NEURA)」を設立。人間のデモンストレーションからロボットがスキルを学ぶ訓練インフラで、NEURA独自のデータ基盤「Neuraverse」によるグローバルデータ連携も実施。欧州の次世代Physical AI開発における主権確立を目指す取り組み。
5️⃣ NVIDIA「Jetson Thor」、エッジ推論性能を公表
出典:NVIDIA Blog / Jetson Thor 製品ページ
NVIDIAブログによると、Jetson ThorはBlackwellベースのPhysical AI・ロボティクス向けエッジプラットフォーム。主要モデルの推論性能は、Mistral 3が52 tokens/s(シングル並列)・最大273 tokens/s(並列8)、Qwen 3.5-35B-A3Bが35 tokens/s、VLAモデルのPI 0.5が120 action tokens/s。 数値はNVIDIA公表のベンチマーク値であり、実運用環境での効果は構成次第で変動する点に留意が必要。エッジでのオープンモデル実行の有力な一次情報。
NVIDIA のブログでは、Jetson Thor 上で Mistral 3 が 52 tokens/s、Qwen 3.5-35B-A3B が 35 tokens/s、PI 0.5 が 120 action tokens/s と示されています。製品ページでは、Jetson Thor をBlackwellベースの physical AI / robotics 向けプラットフォームとして位置づけています。元記事の数値そのものは概ね整合していますが、そこから先の運用効果は断定せず、まずは公開された性能値として扱うのが安全です。 (NVIDIA Blog)
6️⃣ Robbyant、「LingBot-VLA」をオープンソース公開
出典:GitHub / Robotics & Automation News / arXiv
アリババ系列Ant Group傘下の具身AIスタートアップRobbyantは、ロボット向けVLA(視覚・言語・行動)基盤モデル「LingBot-VLA」をApache 2.0ライセンスでGitHubにてオープンソース公開した。リポジトリにはモデルの重みとソースコードが公開されており、誰でも自由に活用・改変が可能。R&A NewsおよびarXivの論文では、約20,000時間の実世界データによる学習と、9種類の双腕ロボット構成への対応が確認できる。コード・ベースモデル・評価ベンチマークデータが一括提供され、研究者や開発者が幅広く利用できる環境が整っている。
7️⃣ Texas Instruments×NVIDIA、mmWaveレーダーをJetson Thor/Holoscanに統合
出典:TI公式
Ant Group傘下のRobbyantが、VLA基盤モデル「LingBot-VLA」をApache 2.0でOSS公開(GitHub: Robbyant/lingbot-vla)。約20,000時間の実世界遠隔操作データを9種の双腕ロボット構成で収集・学習。コード・モデル重み・GM-100ベンチマーク評価資産を一式公開し、π0.5・GR00T N1.6を上回るベンチマーク結果を達成。単腕・双腕・ヒューマノイドにまたがるクロスモーフォロジー汎化を実現したPhysical AI基盤モデルの実用公開事例。
総合考察
2026/3/15に見えるのは、フィジカルAIの競争が「高性能なロボット1台」の勝負から、「継続運用できる仕組み」の勝負へ移っている点でにある。香港の事例は法令対応と衛生基準を含む実装力、BMWは既存工場への段階統合、TUM RoboGymは人のデモから学ぶ訓練基盤、Jetson ThorとLingBot VLAは現場で動かすための推論基盤とモデル供給を担う。つまり価値の源泉は、ハード単体ではなく、規制、データ、学習施設、エッジ計算、OSS、運用設計を束ねる総合力に移りつつある。加えて、中国は実地イベントと実装速度、欧州は製造現場と主権型研究基盤、米系は計算基盤とモデル流通で存在感を示しており、地域ごとの役割分担も鮮明だ。一方で、実証や公表ベンチマークの段階にあるテーマも多く、ROI、安全性、汎化性能は今後の運用実績で見極める必要がある。
今後注目ポイント
香港の外食ロボットは、技術そのものよりも衛生規制、営業ライセンス、24時間運用を一体で成立させた点が重要で、今後は多拠点展開時の保守体制と採算性の再現性が最大の注目点になる。
北京ハーフマラソンは話題性以上に、人混み近接環境での自律ナビ、転倒率、介入頻度、完走率を測る公開テストとして価値があり、実世界移動ロボの比較基準になる可能性が高い。
BMWとHexagonの焦点は「導入したか」ではなく、既存ラインでどの工程を代替し、品質歩留まりや安全性、作業者との協働効率をどこまで改善できるかという定量成果の開示にある。
TUM RoboGymは、欧州がロボット本体だけでなく学習インフラとデータ主権を押さえにきた象徴であり、Neuraverse連携でどれだけ汎化スキルを量産できるかが競争力を左右する。
Jetson ThorとVLAのOSS化が重なることで、開発競争はモデル入手から現場最適化へ移るため、今後は遅延、消費電力、セーフティ制御を含む実装品質が差別化要因になる。
今後は視覚中心の認識だけでなく、mmWaveなど非視覚センサーとエッジ推論の統合が進むかも重要で、暗所や煙、反射環境でも動ける堅牢性が本当の産業価値を決める。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #2026年
- #香港
- #nvidia
- #BMW
- #オープンソース
- #フィジカルAI
- #一次情報
- #エッジAI
- #AI最新情報
- #AEON
- #ヒューマノイドロボット
- #PhysicalAI
- #2026年3月
- #BLACKWELL
- #香港政府
- #VLA
- #自動調理
- #Qwen35
- #ロボット導入
- #産業化
- #TexasInstruments
- #crep
- #Hexagon
- #ロボット学習
- #JetsonThor
- #Mistral3
- #FIGURE02
- #AntGroup
- #実世界データ
- #Neuraverse
- #NEURARobotics
- #LingBotVLA
- #双腕ロボット
- #TUM
- #学習基盤
- #mmwave
- #Robbyant
- #Holoscan
- #TUMRoboGym
- #ロボットハーフマラソン
- #24時間ホットミール
- #クロスモーフォロジー
- #PI05
- #ロボティクス推論
- #欧州ロボティクス
- #MIRMI
- #製造業ロボティクス
- #LeipzigiFACTORY
- #BaturuChallenge
- #北京ETown
- #FEHD
- #スマートケータリング
- #自律ナビゲーション
