フィジカルAIニュース(2026/3/13号)

更新日:2026/3/13
エグゼクティブサマリー
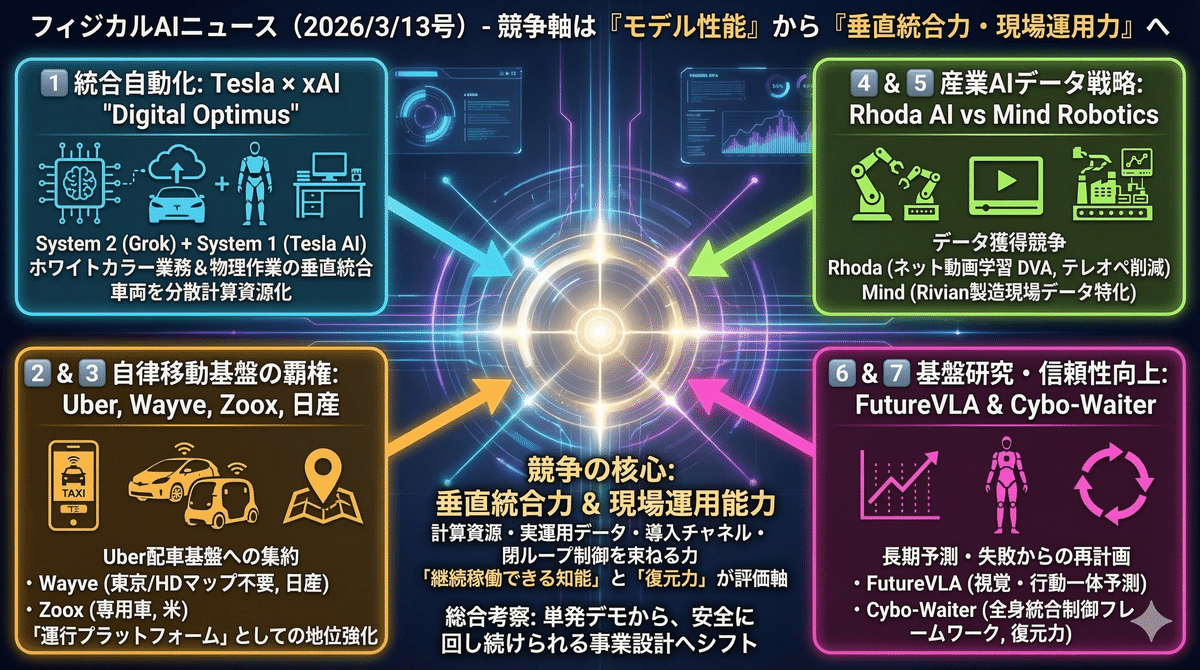
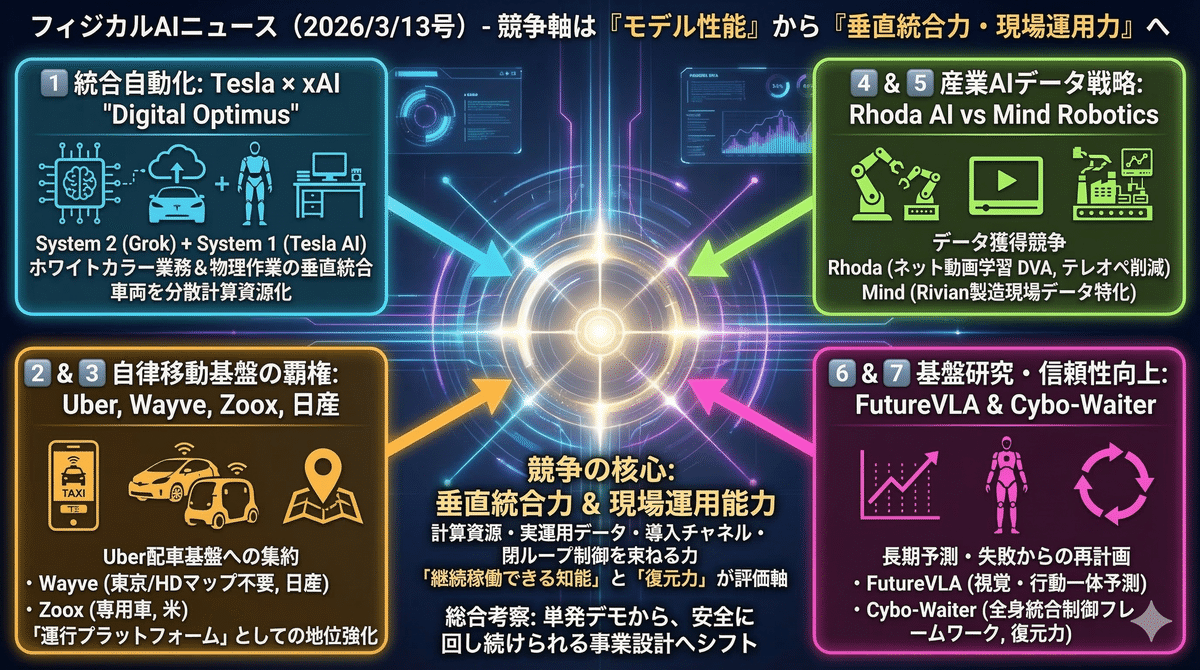
2026/3/12のフィジカルAIは、ヒューマノイド単体の進化ではなく、デジタル労働・自律移動・産業ロボット・基盤研究が同時に結びつく点が見られた。TeslaとxAIはDigital Optimusで企業業務と実機ロボットの統合自動化を志向し、UberはWayve・Zoox連携でロボタクシー運行基盤としての地位を強化。Rhoda AIとMind Roboticsは学習データの獲得戦略を競い、FutureVLAとCyboWaiterは長期予測と再計画を通じて実機信頼性を底上げする。市場は「誰が賢いモデルを作るか」から、「誰が運用データと配車基盤と現場導入能力を握るか」へ競争軸が移っていることも見えてきている。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ Tesla × xAI 共同プロジェクト「Digital Optimus(Macrohard)」公開
出典:Teslarati / Electrek
xAIとTeslaが共同開発する「Digital Optimus(別名Macrohard)」は、GrokをSystem 2(高次推論層)、TeslaのAIをSystem 1(本能的実行層)とした二重構造AIシステム。$650のTesla「AI4」チップとxAIのNvidiaクラウドを組み合わせたハイブリッド構成で動作し、リアルタイムの画面映像やキーボード・マウス操作を処理する。経理・人事などのホワイトカラー業務を担うデジタル版Optimusと、物理作業を担う実機Optimusロボットを連動させ、企業全体の機能をシミュレート・自動化する垂直統合モデルを目指す。
⚠️ 注目ポイント 駐車中のTesla車両を分散コンピューターとして活用する構想を含み、クラウド依存を大幅削減。労働市場への破壊的影響が最も直接的なトピックの一つ。
2️⃣ 日産 × Uber × Wayve ロボタクシー東京パイロット発表
出典:BusinessWire(公式PR) / Reuters
NissanとUber、英Wayveが共同でロボタクシー開発のMOUを締結。2026年後半の東京パイロット展開に向け準備を開始(当局協議前提)。 初期フェーズはUberプラットフォーム経由で配車し、訓練済み安全オペレーターが同乗。UberはNissanの認定タクシーパートナー経由でサービス展開予定。WayveのエンドツーエンドAI「Wayve AI Driver」はHDマップ不要で設計されており、Nissan LEAF量産車に統合。東京を含む世界10都市以上への展開を目指す。
🗾 日本市場への影響 大都市・高規制環境での初の本格ロボタクシー実証として国際的注目度が高い。認可タクシーパートナー経由の安全設計は日本規制要件に沿った現実的アプローチ。
3️⃣ Zoox × Uber 戦略提携(ラスベガス2026年夏→LA2027年展開)
出典:Uber Investor Relations(公式PR) / Reuters
Amazon傘下Zooxが、ハンドル・ペダルを持たない専用設計のロボタクシーをUberアプリで提供する戦略的パートナーシップを締結。ラスベガスで2026年夏に開始し、ロサンゼルスへは2027年中盤までに展開予定。Zooxにとって初の第三者プラットフォームとの提携となる。同社はすでに自律走行距離100万マイル超・30万人超のライダー実績を持ち、需要プラットフォームのUberと組み合わせることで自律走行サービスの本格普及が加速すると期待される。
💡 市場インプリケーション WayveとUberの提携と同日発表。Uberがロボタクシーの「運行プラットフォーム」として覇権を握る動きが鮮明に。
4️⃣ Rhoda AI ステルス解除:$450M Series A調達+DVAモデル発表
出典:Robotics and Automation News / Pulse 2.0
Rhoda AIが18ヶ月のステルスを経て公開ローンチし、シリーズAで4億5000万ドルを調達。独自アーキテクチャ「DVA(Direct Video Action)」は、数億本のインターネット動画から物体の動きや物理インタラクションを学習し、わずか約10時間のテレオペデータで新タスクを習得する。数百ミリ秒ごとに環境を観察・予測しアクションを修正する閉ループ制御を採用し、レイアウトが常に変化する製造現場でも人手介入なく稼働を実証した。
🔬 技術的意義 大量テレオペレーションデータへの依存を劇的に削減。Mind Roboticsとの「汎用ビデオ vs 製造特化データ」対比は2026年ロボットAI業界の主要論点。
5️⃣ Mind Robotics $500M Series A調達(Rivianスピンアウト・工場向け基盤モデル)
出典:BusinessWire(公式PR) / Reuters
Rivian創業者兼CEOのRJ ScaringeがCEOを務めるスピンアウト企業Mind Roboticsが、AccelとAndreessen Horowitz共同主導のシリーズAで5億ドルを調達(企業価値20億ドル)。Rivianが主要株主兼パートナーとして製造現場の大規模データとラウンチ環境を提供し、モデル訓練のデータフライホイールを構築。ヒューマノイドではなく既存製造ラインに対応した産業ロボットに特化し、巧緻性・適応性・物理的推論が求められるタスクの自動化を目指す。
📊 コンセンサス注目度:高 PhysicalAIの学習データ不足を解決する「データ供給型スタートアップ」の有力モデル。
6️⃣ FutureVLA:視覚・行動の一体予測でVLA長期物理性能を向上(arXiv:2603.10712)
出典:arXiv:2603.10712 / ICLR 2026 VLAトレンド解説
FutureVLAは、Joint Visuomotor Gatingにより視覚表現と運動表現を一度切り離し、環境拘束と連続的な物理ダイナミクスを統合した将来予測埋め込みを学習する。既存VLAの推論アーキテクチャを変更せずに、ポストトレーニングで長期的な予測性能を底上げできる点が特徴とされる。この世界モデル的コンポーネントを組み込むことで、障害物回避や長尺マニピュレーションといった長期依存タスクにおいて、軌道予測の精度向上や接触失敗リスクの低減に寄与しうる。
🔍 研究トレンド VLA研究群の中で最も汎用的な性能改善をもたらす可能性を持つ。閉ループ制御での「先読み」能力向上は実機信頼性の根本課題に直結。
7️⃣ Cybo-Waiter:ヒューマノイド全身ロコモーション×マニピュレーション統合フレームワーク(arXiv:2603.10675)
出典:arXiv:2603.10675 / arXiv HTML版
Cybo-Waiterは、自然言語指示をVLMがJSONスキーマのサブタスク列にコンパイルし、SAM3+RGB-Dで全タスク関連物体を3D幾何状態として追跡・監視する物理エージェントフレームワーク。下半身はRLポリシー、上半身はMPCで独立制御し、Supervisorがprecondition/success conditionを述語評価して失敗時には自動リグラウンディング・再計画を呼び出す。「Bring-me-a-drink」などの長尺タスクでSupervisorなし比+29%の成功率向上を示し、ヒューマノイドの実環境長尺タスクに向けたリファレンスアーキテクチャを提示した。
🦾 産業インパクト 工場・物流現場でのヒューマノイド実運用に直結する制御スタック。Tesla Optimusなど商用ヒューマノイドが目指すソフトウェア基盤の方向性と整合する重要研究。
総合考察
2026/3/12は、PhysicalAIの競争優位がモデル性能の一点突破ではなく、計算資源、実運用データ、導入チャネル、閉ループ制御を束ねる“垂直統合力”へ移っている点に特長がある。Teslaは車両群とxAIを結び、Uberは複数の自律走行企業を束ねる需要基盤を押さえ、Rhoda AIとMind Roboticsは異なるデータ調達思想で産業現場の学習優位を狙う。研究面でもFutureVLAとCyboWaiterが示すように、実環境では長期予測、失敗時の再接地、全身協調が不可欠であり、単発デモではなく継続稼働できる知能が評価軸になった。今後は、AIの性能競争よりも、現場で安全に回し続けられる事業設計の巧拙が勝敗を分ける。
今後注目ポイント
TeslaのDigital Optimusが真に破壊的になる条件は、LLMやロボット性能そのものより、社内業務フローと実機作業を同一モデルで接続し、改善ループを高速で回せるかにある。AIが部署単位ではなく企業OS化するかが焦点。
UberはWayveとZooxを同時に抱えることで、ロボタクシー時代の勝者が“最良の自動運転技術企業”ではなく、“需要と運行を束ねる市場設計者”になる可能性を示した。航空業界のGDSに近い支配構造が生まれるか注目。
Rhoda AIとMind Roboticsの対比は、汎用動画由来の知能が勝つのか、製造現場に根差した専用データが勝つのかという根源論争であり、2026年の産業ロボット投資判断を左右する分岐点として見る価値が高い。
FutureVLAやCyboWaiterが重要なのは、派手な生成能力ではなく、長尺タスクで失敗を先読みし、途中で立て直せることを示した点にある。商用化の壁は知能の高さより、復元力と継続安定性に移っている。
日本市場では、日産とUberとWayveの東京実証が、単なる実験ではなく、高規制都市での安全設計テンプレートになる可能性がある。ここで成立した運用モデルは、他のアジア大都市へ横展開されやすい。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #Amazon
- #2026年
- #grok
- #nvidia
- #自動運転
- #ロサンゼルス
- #Uber
- #日産
- #tesla
- #ラスベガス
- #フィジカルAI
- #xai
- #ヒューマノイド
- #ロボタクシー
- #AI最新情報
- #PhysicalAI
- #2026年3月
- #世界モデル
- #OPTIMUS
- #leaf
- #VLM
- #垂直統合
- #VLA
- #マニピュレーション
- #ZOOX
- #rivian
- #SeriesA
- #Wayve
- #テレオペ
- #長期予測
- #MacroHard
- #DVA
- #ホワイトカラー自動化
- #データフライホイール
- #再計画
- #自然言語指示
- #閉ループ制御
- #MindRobotics
- #RJScaringe
- #全身制御
- #AI4
- #RhodaAI
- #企業OS
- #FutureVLA
- #CyboWaiter
- #実機信頼性
- #労働市場インパクト
- #DigitalOptimus
- #東京パイロット
- #HDマップ不要
- #運行プラットフォーム
- #DirectVideoAction
- #製造業ロボット