フィジカルAIニュース(2026/4/27号)

更新日:2026/4/27
エグゼクティブサマリー
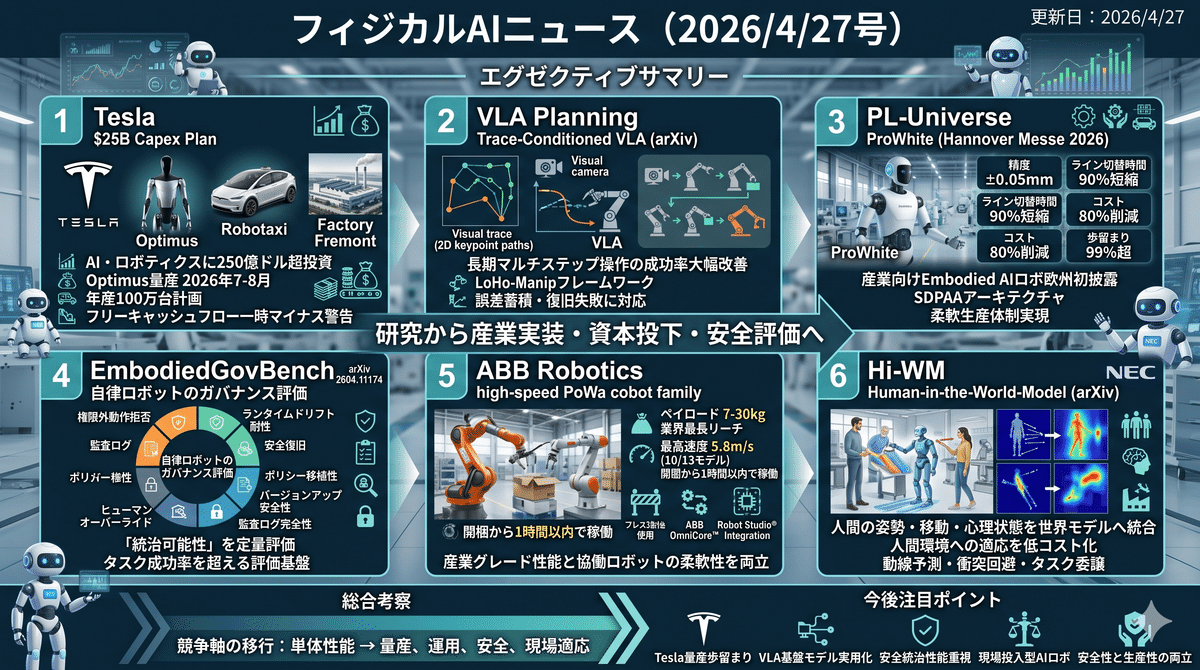
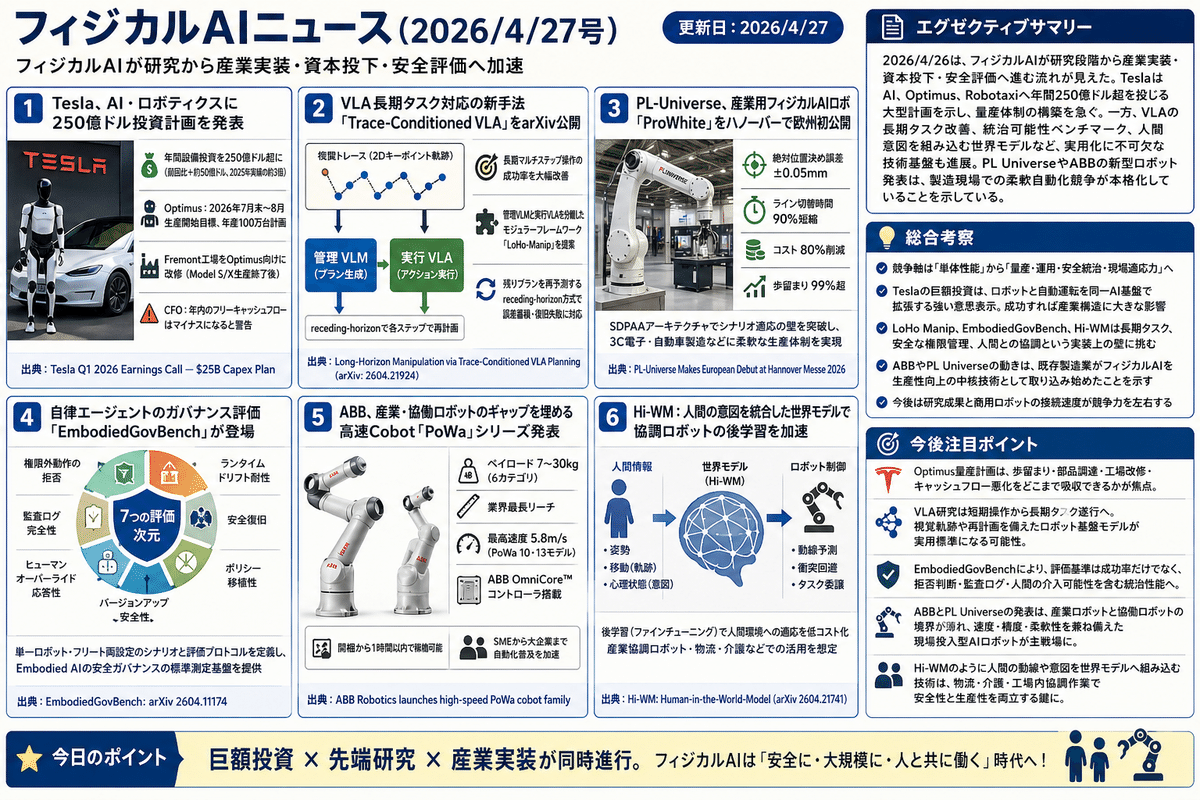
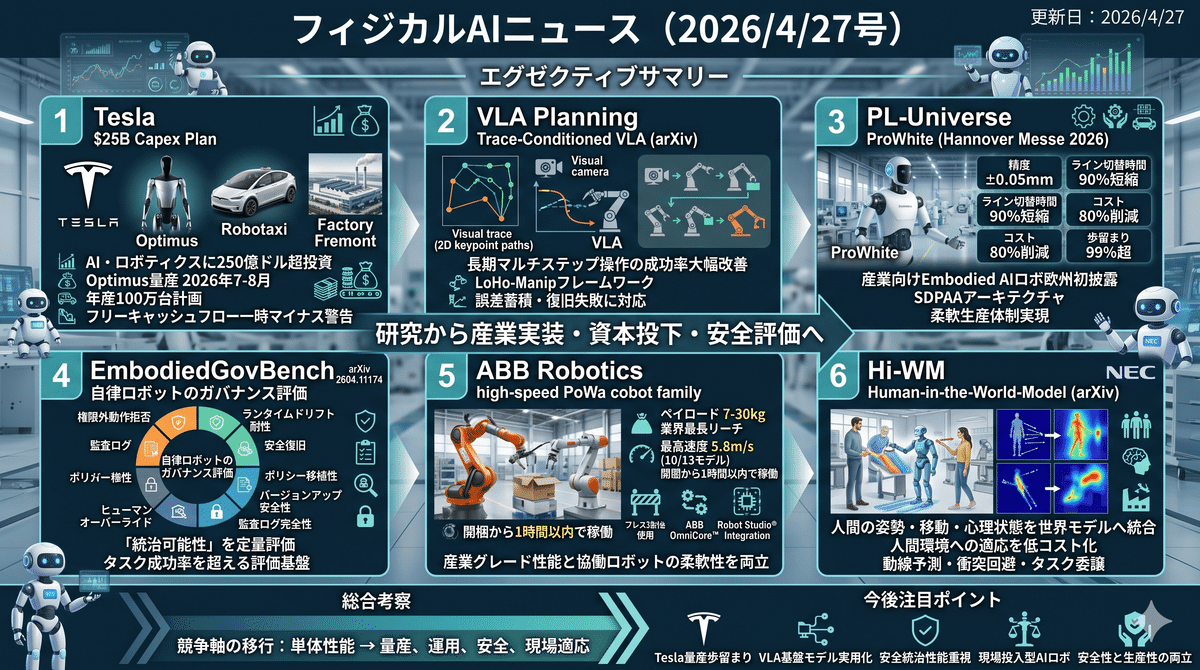
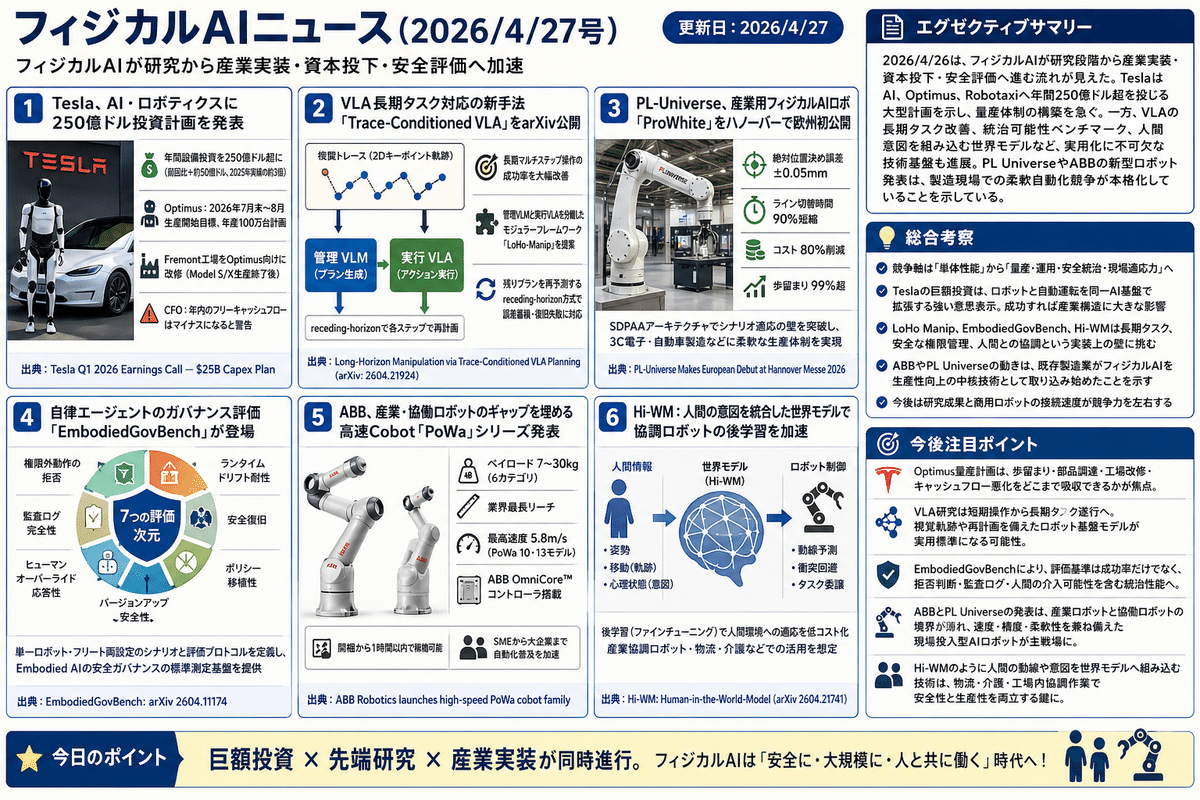
2026/4/26は、フィジカルAIが研究段階から産業実装・資本投下・安全評価へ進む流れが見えた。TeslaはAI、Optimus、Robotaxiへ年間250億ドル超を投じる大型計画を示し、量産体制の構築を急ぐ。一方、VLAの長期タスク改善、統治可能性ベンチマーク、人間意図を組み込む世界モデルなど、実用化に不可欠な技術基盤も進展。PL UniverseやABBの新型ロボット発表は、製造現場での柔軟自動化競争が本格化していることを示している。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ Tesla、AI・ロボティクスに250億ドル投資計画を発表
🔗 出典:Tesla Q1 2026 Earnings Call — $25B Capex Plan
TeslaはQ1 2026決算説明会で、AIトレーニング・Optimusロボット量産・Robotaxiインフラへの年間設備投資を250億ドル超に引き上げると発表。前回ガイダンスから約50億ドルの増額で、2025年実績(85億ドル)の約3倍にあたる。CFOのVaibhav Tanejaは年内のフリーキャッシュフローがマイナスになると警告。Optimusは2026年7月末〜8月頃の生産開始を目標とし、第1世代生産ラインで年産100万台を計画。FremontではModel S/X生産終了後、Optimus向けに工場改修中。
2️⃣ VLA長期タスク対応の新手法「Trace-Conditioned VLA」をarXiv公開
🔗 出典:Long-Horizon Manipulation via Trace-Conditioned VLA Planning (arXiv)
現在観測から「次にどこへ行き何に近づくか」を示す2Dキーポイント軌跡(visual trace)をVLAの条件入力として与え、長期マルチステップ操作の成功率を大幅改善するモジュラーフレームワーク「LoHo-Manip」を提案(arXiv: 2604.21924)。管理VLMと実行VLAを分離し、各ステップで残りプランを再予測するreceding-horizon方式により、既存VLAが長期タスクで陥りやすい誤差蓄積・復旧失敗の課題に対応する。
3️⃣ PL-Universe、産業用フィジカルAIロボ「ProWhite」をハノーバーで欧州初公開
🔗 出典:PL-Universe Makes European Debut at Hannover Messe 2026
中国のPL-Universe RoboticsがHannover Messe 2026(4月下旬、ドイツ)で産業向けEmbodied AIロボット「ProWhite」を欧州初披露。絶対位置決め誤差±0.05mm、ライン切替時間90%短縮・コスト80%削減、歩留まり99%超を実演。シナリオ適応の壁を突破するSDPAAアーキテクチャを採用し、3C電子・自動車製造などの産業向けに柔軟な生産体制を実現。今後は欧州でのローカルパートナーシップ強化により、欧州製造業市場への本格参入を宣言した。
4️⃣ 自律エージェントのガバナンス評価「EmbodiedGovBench」が登場
🔗 出典:EmbodiedGovBench: arXiv 2604.11174
自律ロボットエージェントの「統治可能性(Governability)」を定量評価する初のベンチマーク「EmbodiedGovBench」を提案(arXiv: 2604.11174)。タスク成功率一辺倒の既存評価を超え、権限外動作の拒否・ランタイムドリフト耐性・安全復旧・ポリシー移植性・バージョンアップ安全性・ヒューマンオーバーライド応答性・監査ログ完全性の7次元を網羅。単一ロボット・フリート両設定でのシナリオテンプレートと評価プロトコルを定義し、Embodied AI安全ガバナンスの標準測定基盤を提供する。
5️⃣ ABB、産業・協働ロボットのギャップを埋める高速Cobot「PoWa」シリーズ発表
🔗 出典:ABB Robotics launches high-speed PoWa cobot family
ABB Roboticsが産業グレードの性能と協働ロボットの柔軟性を両立する「PoWa™」cobotファミリーを発表。ペイロード7〜30kgの6カテゴリ、業界最長リーチ、最高速度5.8m/s(PoWa 10・13モデル)を実現し、既存cobotの速度・ペイロードの限界を突破。ABB OmniCore™コントローラを搭載し、AI搭載ソフトウェア(Robot Studio®等)とシームレスに統合可能。開梱から1時間以内で稼働でき、SMEから大企業まで製造現場への自動化普及を加速させる。
6️⃣ Hi-WM:人間の意図を統合した世界モデルで協調ロボットの後学習を加速
🔗 出典:Hi-WM: Human-in-the-World-Model (arXiv 2604.21741)
ロボット世界モデルに人間の姿勢・移動・心理状態を統合し、後学習(ファインチューニング)で人間環境への適応を低コスト化する手法「Hi-WM」をarXivで公開。産業協調ロボット・物流・介護領域での動線予測・衝突回避・タスク委譲への応用を想定。NEC(2026年3月)の類似アプローチの学術的裏付けともなる研究。
総合考察
2026/4/26は、フィジカルAIの競争軸が「単体ロボットの性能」から「量産、運用、安全統治、現場適応力」へ移っていることが読み取れました。Teslaの巨額投資は、ロボットと自動運転を同一AI基盤で拡張する強い意思表示であり、成功すれば産業構造に大きな影響を与える。一方で、LoHo Manip、EmbodiedGovBench、Hi WMのような研究は、長期タスクの失敗、安全な権限管理、人間との協調という実装上の壁を正面から扱っている。さらにABBやPL Universeの動きは、既存製造業がフィジカルAIを生産性向上の中核技術として取り込み始めたことを示しており、今後は研究成果と商用ロボットの接続速度が競争力を左右する。
今後注目ポイント
TeslaのOptimus量産計画は、技術そのものよりも歩留まり、部品調達、工場改修、キャッシュフロー悪化をどこまで吸収できるかが最大の焦点になる。
VLA研究は短期操作から長期タスク遂行へ進みつつあり、今後は視覚軌跡や再計画機構を備えたロボット基盤モデルが実用標準になる可能性がある。
EmbodiedGovBenchの登場により、ロボットの評価基準は成功率だけでなく、拒否判断、監査ログ、人間の介入可能性を含む統治性能へ広がる。
ABBとPL Universeの発表は、産業ロボットと協働ロボットの境界が薄れ、速度、精度、柔軟性を兼ね備えた現場投入型AIロボットが主戦場になることを示す。
Hi WMのように人間の動線や意図を世界モデルへ組み込む技術は、物流、介護、工場内協調作業で安全性と生産性を両立する鍵になる。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #2026年
- #AI投資
- #フィジカルAI
- #tesla
- #AIガバナンス
- #ロボティクス
- #設備投資
- #AI最新情報
- #2026年4月
- #介護ロボット
- #スマートファクトリー
- #PhysicalAI
- #世界モデル
- #協働ロボット
- #OPTIMUS
- #VLA
- #監査ログ
- #ROBOTAXI
- #工場自動化
- #embodiedaI
- #産業ロボット
- #cybercab
- #ABB
- #衝突回避
- #物流ロボット
- #ロボット量産
- #cobot
- #長期タスク
- #ロボット安全性
- #協調ロボット
- #製造自動化
- #HANNOVERMESSE2026
- #Governability
- #RobotStudio
- #HumanOverride
- #次世代製造
- #AI安全評価
- #人間意図理解
- #HumanInTheWorldModel
- #HiWM
- #EmbodiedGovBench
- #OmniCore
- #SDPAA
- #柔軟生産
- #ProWhite
- #PLUniverse
- #RecedingHorizon
- #VisualTrace
- #マルチステップ操作
- #LoHoManip
- #TraceConditionedVLA
- #powa