Uncertainty-Aware Trajectory Prediction: A Unified Framework Harnessing Positional and Semantic Uncertainties
arXiv cs.CV / 4/1/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper targets trajectory prediction by addressing uncertainty from two real-time map error sources: positional inaccuracies (sensor noise/occlusions) and semantic misinterpretations (scene context errors).
- It proposes a unified, end-to-end framework with a dual-head, dual-pass architecture that estimates positional and semantic predictions separately while deriving uncertainty variances as explicit uncertainty indicators.
- The framework then fuses the estimated uncertainties back into the trajectory prediction pipeline to improve robustness of forecasts.
- Experiments on the nuScenes dataset across four map estimation methods and two trajectory prediction baselines show consistent gains on minADE, minFDE, and Miss Rate, alongside effective quantification of map uncertainty in both positional and semantic dimensions.
- The authors indicate the code will be made available at the provided GitHub repository link.
Related Articles

Show HN: 1-Bit Bonsai, the First Commercially Viable 1-Bit LLMs
Dev.to

I Built an AI Agent That Can Write Its Own Tools When It Gets Stuck
Dev.to

Agent Self-Discovery: How AI Agents Find Their Own Wallets
Dev.to
[P] Federated Adversarial Learning
Reddit r/MachineLearning
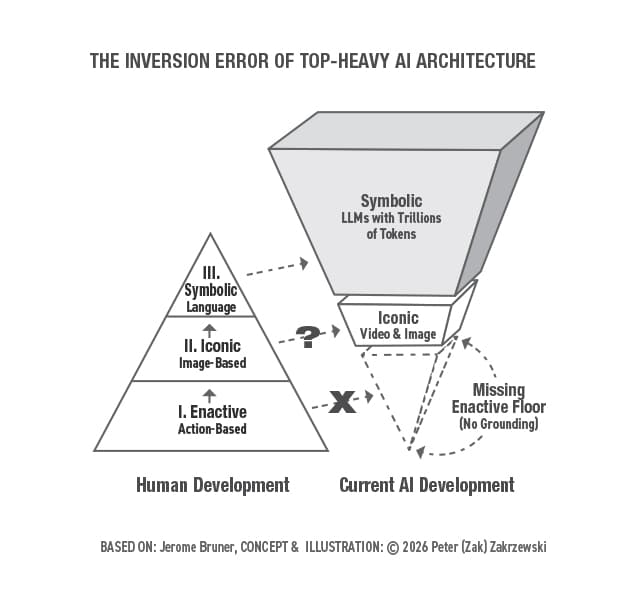
The Inversion Error: Why Safe AGI Requires an Enactive Floor and State-Space Reversibility
Towards Data Science