Hierarchical Visual Relocalization with Nearest View Synthesis from Feature Gaussian Splatting
arXiv cs.CV / 4/1/2026
📰 NewsIdeas & Deep AnalysisModels & Research
Key Points
- The paper presents SplatHLoc, a hierarchical visual relocalization framework that estimates camera pose for previously known scenes using Feature Gaussian Splatting as the underlying scene representation.
- It improves handling of sparse database observations via an adaptive viewpoint retrieval method that synthesizes virtual candidate viewpoints better aligned with the query to strengthen initial pose estimates.
- For matching, the method uses a hybrid strategy that leverages Gaussian-rendered features for coarse matching and directly extracted image features for fine matching, aiming to combine complementary strengths.
- Experiments on indoor and outdoor datasets show improved robustness and report state-of-the-art performance for visual relocalization.
Related Articles

Show HN: 1-Bit Bonsai, the First Commercially Viable 1-Bit LLMs
Dev.to

I Built an AI Agent That Can Write Its Own Tools When It Gets Stuck
Dev.to

Agent Self-Discovery: How AI Agents Find Their Own Wallets
Dev.to
[P] Federated Adversarial Learning
Reddit r/MachineLearning
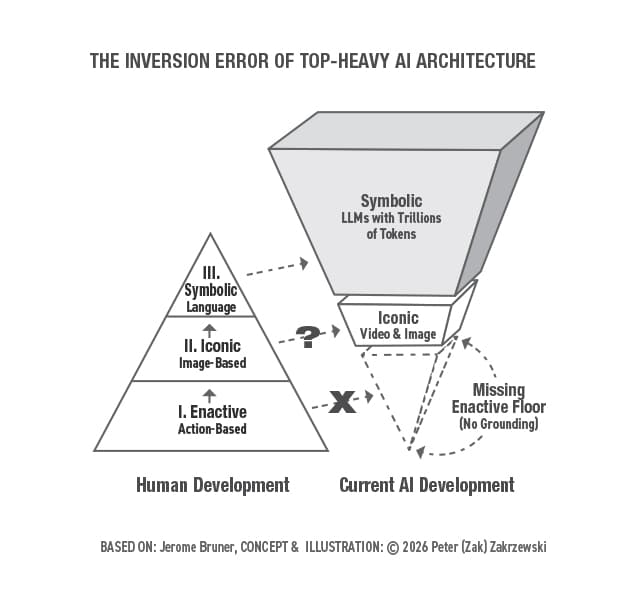
The Inversion Error: Why Safe AGI Requires an Enactive Floor and State-Space Reversibility
Towards Data Science