EgoWalk: A Multimodal Dataset for Robot Navigation in the Wild
arXiv cs.RO / 4/21/2026
📰 NewsDeveloper Stack & InfrastructureSignals & Early TrendsModels & Research
Key Points
- The paper introduces EgoWalk, a multimodal robot navigation dataset comprising 50 hours of human navigation data collected across diverse indoor and outdoor settings, seasons, and locations.
- In addition to raw recordings and imitation-learning-ready data, the dataset provides derived resources such as natural-language goal annotations and traversability segmentation masks.
- The authors include automated pipelines to generate subsidiary datasets for multiple navigation-related tasks, enabling broader downstream usage.
- EgoWalk is supported by diversity studies, use cases, and benchmarks to demonstrate practical applicability and robustness in uncontrolled, real-world conditions.
- All data processing pipelines and documentation of the data-collection hardware platform are released openly to facilitate future research and development in robot navigation.
💡 Insights using this article
This article is featured in our daily AI news digest — key takeaways and action items at a glance.
Related Articles
Capsule Security Emerges From Stealth With $7 Million in Funding
Dev.to

Rethinking Coding Education for the AI Era
Dev.to

Agent Package Manager (APM): A DevOps Guide to Reproducible AI Agents
Dev.to

3 Things I Learned Benchmarking Claude, GPT-4o, and Gemini on Real Dev Work
Dev.to
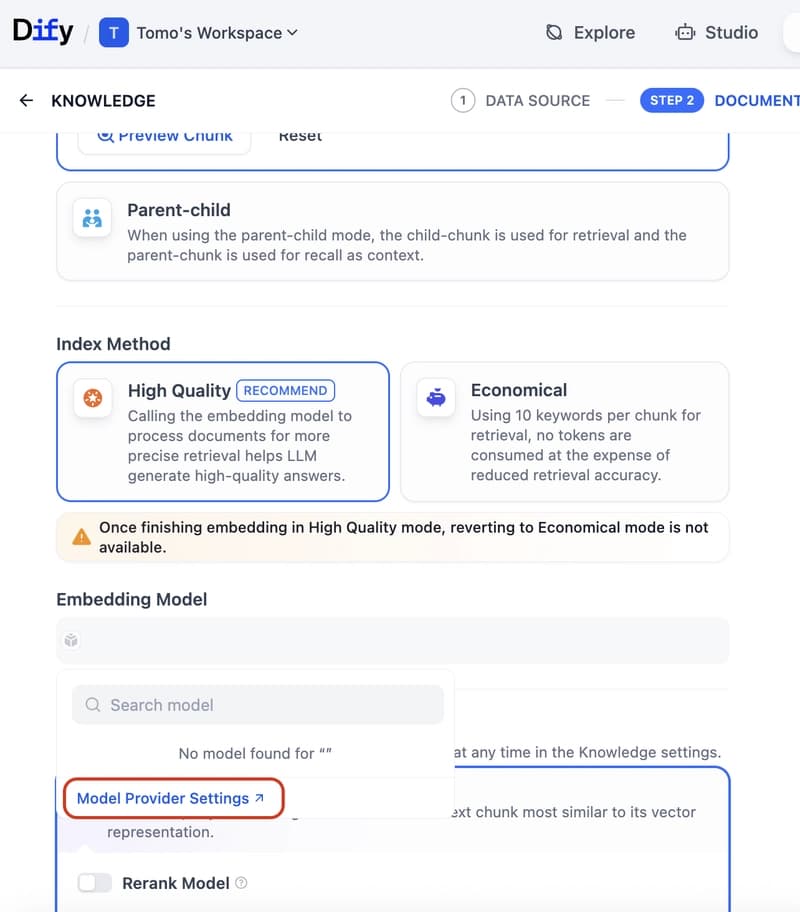
Dify Now Supports IRIS as a Vector Store — Setup Guide
Dev.to