TrajRAG: Retrieving Geometric-Semantic Experience for Zero-Shot Object Navigation
arXiv cs.CV / 5/5/2026
📰 NewsIdeas & Deep AnalysisModels & Research
Key Points
- TrajRAG is a retrieval-augmented generation framework for zero-shot Object Goal Navigation that replaces purely internet-scale commonsense with embodied geometric-semantic experience.
- The method incrementally accumulates past navigation episodes into a “lifelong” knowledge base by converting raw observations into a compact topological-polar trajectory representation.
- A hierarchical chunking approach groups similar trajectories into unified summaries, enabling coarse-to-fine retrieval of relevant experiences.
- During navigation, frontier candidates produce multiple trajectory hypotheses that query TrajRAG for similar past trajectories to improve waypoint selection using large-model reasoning.
- Experiments on MP3D, HM3D-v1, and HM3D-v2 indicate that retrieving geometric-semantic experience improves zero-shot ObjectNav performance.
Related Articles
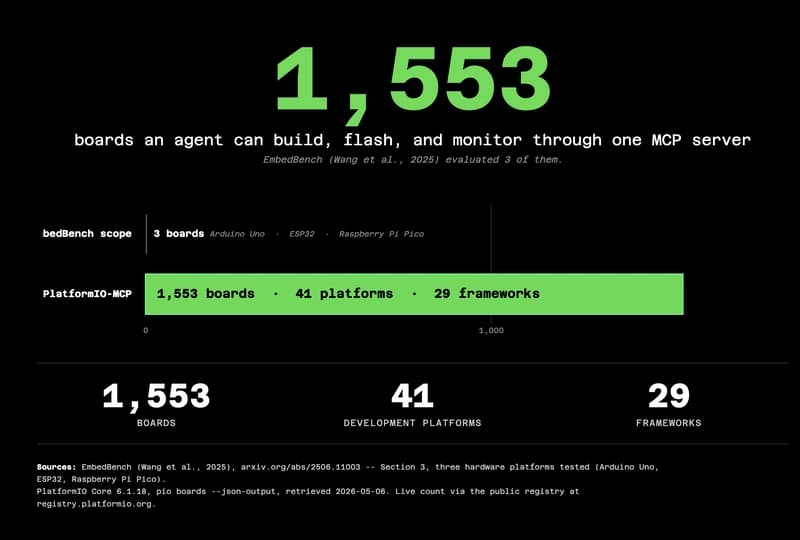
The 55.6% problem: why frontier LLMs fail at embedded code
Dev.to
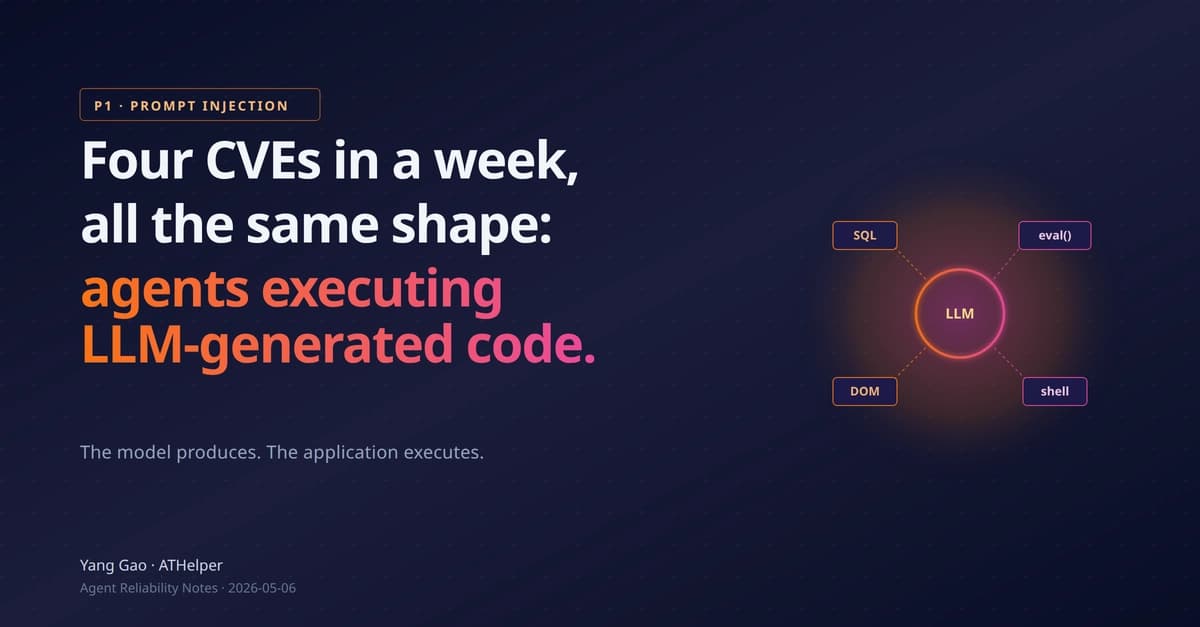
Four CVEs in a week, all the same shape: when agents execute LLM-generated code
Dev.to
Healthcare AI Is Absorbing Institutional Knowledge It Can't Actually Hold
Reddit r/artificial
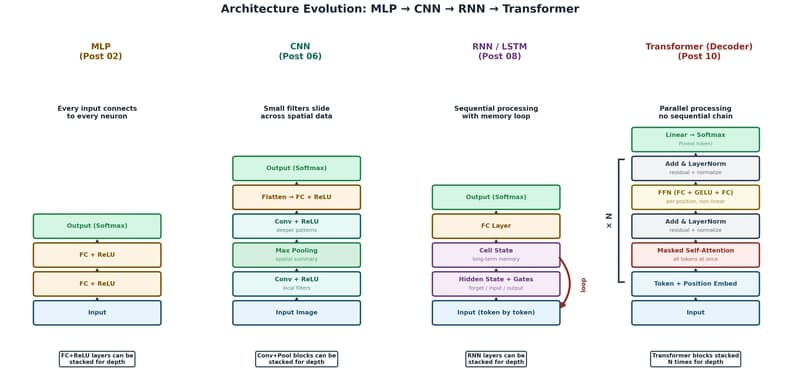
The Transformer: The Architecture Behind Modern AI
Dev.to

Foundational Models Defining a New Era in Vision: A Survey and Outlook
Dev.to