Flow with the Force Field: Learning 3D Compliant Flow Matching Policies from Force and Demonstration-Guided Simulation Data
arXiv cs.RO / 4/17/2026
💬 OpinionDeveloper Stack & InfrastructureIdeas & Deep AnalysisModels & Research
Key Points
- The paper addresses a key weakness in current visuomotor imitation policies: they often ignore compliance and can therefore produce excessive contact forces or brittle behavior in uncertain contact-rich manipulation tasks.
- It proposes a framework to generate force-informed simulation data using a small amount of supervision—specifically, a single human demonstration—to reduce the burden of data collection.
- The method couples this force-informed, demonstration-guided synthetic data with a compliant flow matching policy, improving how well a visuomotor policy learned in simulation transfers to real robots.
- Experiments on real-robot tasks (non-prehensile block flipping and bi-manual object moving) show reliable contact maintenance and the ability to adapt to novel conditions.
- The work aims to mitigate the Sim2Real gap by producing simulation trajectories that are physically informative enough to support learning robust contact behavior on hardware.
Related Articles

Big Tech firms are accelerating AI investments and integration, while regulators and companies focus on safety and responsible adoption.
Dev.to
10 ChatGPT Prompts Every Genetic Counselor Should Be Using in 2025
Dev.to

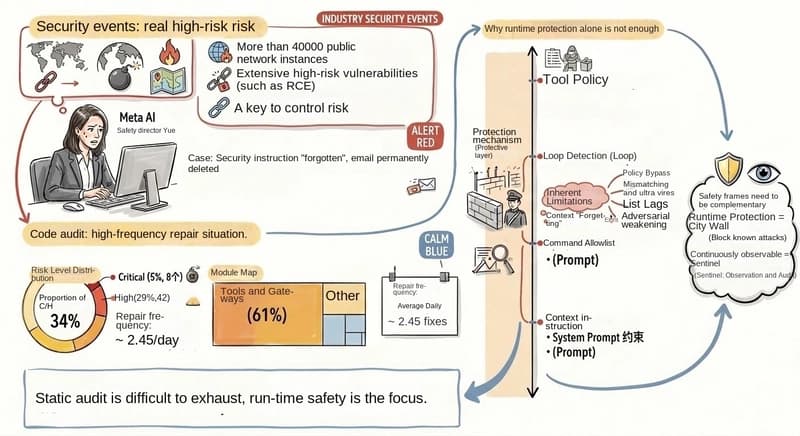
The Memory Wall Can't Be Killed — 3 Papers Proving Every Architecture Hits It
Dev.to
Achieve Operational Control for OpenClaw with Alibaba Cloud SLS One-Click Integration
Dev.to
BlueColumn vs Mem0: Which AI Agent Memory API Should You Use?
Dev.to