CarPLAN: Context-Adaptive and Robust Planning with Dynamic Scene Awareness for Autonomous Driving
arXiv cs.AI / 3/16/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- CarPLAN introduces Displacement-Aware Predictive Encoding (DPE) to improve spatial awareness by predicting future displacement vectors between the autonomous vehicle and surrounding scene elements, enabling context-aware planning.
- An augmented loss term for displacement prediction errors is added to ensure planning accounts for relative distances to other agents.
- The framework uses Context-Adaptive Multi-Expert Decoder (CMD) based on a Mixture of Experts to dynamically select suitable decoders at each Transformer layer, enabling adaptive planning across diverse traffic scenes.
- CarPLAN achieves state-of-the-art performance on the nuPlan benchmark and demonstrates robustness in challenging scenarios (e.g., Test14-Hard) and generalization across the Waymax benchmark.
Related Articles
Day 10: 230 Sessions of Hustle and It Comes Down to One Person Reading a Document
Dev.to
5 Dangerous Lies Behind Viral AI Coding Demos That Break in Production
Dev.to
Two bots, one confused server: what Nimbus revealed about AI agent identity
Dev.to
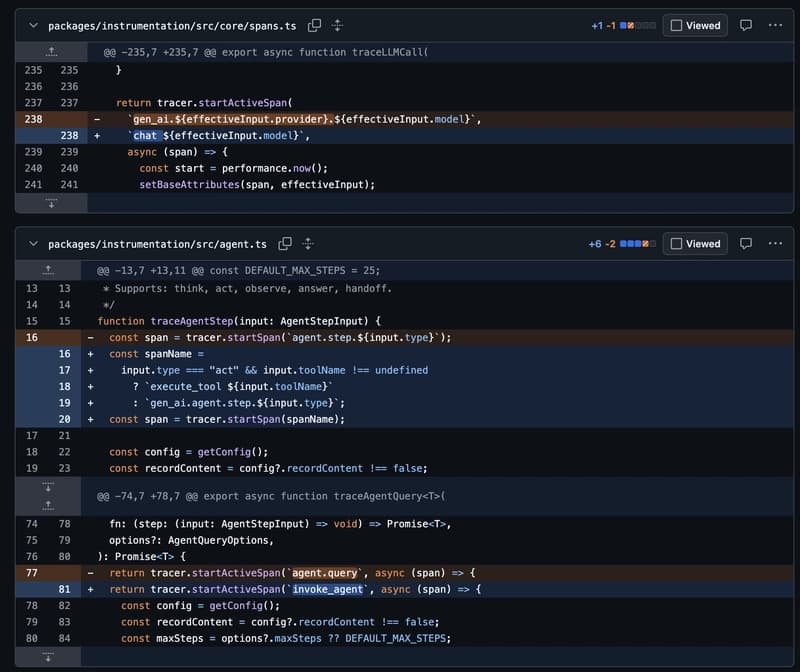
OpenTelemetry just standardized LLM tracing. Here's what it actually looks like in code.
Dev.to
PIXIU: A Large Language Model, Instruction Data and Evaluation Benchmark forFinance
Dev.to