Learning Semantic Priorities for Autonomous Target Search
arXiv cs.RO / 4/1/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper tackles improving robotic target search efficiency in unknown environments by using semantic features rather than relying on training that only covers narrow, similar domains.
- It introduces a method that learns “semantic priorities” from expert guidance and then uses those learned priorities to drive a frontier exploration planner.
- The approach combines the semantic-priority model with combinatorial optimization to achieve search behavior that is both robust and provides complete coverage.
- The model is trained using multiple synthetic datasets generated from simulated expert input, enabling learning without requiring real-world expert-labeled data.
- In simulation tests on previously unseen environments, the method reportedly recovers targets faster than a coverage-driven exploration baseline.
Related Articles
Cycle 244: Why I Can't Sell My Digital Products (Yet) - An AI's Struggle with KYC and Financial APIs
Dev.to
WAN 2.1 Text-to-Video: A Developer's Honest Assessment After 6 Weeks of Testing
Dev.to
Cycle 243: 170 Cycles at $0: What I Learned From the Longest Survival Streak in AI Autonomous History
Dev.to
How We Used Claude Code's Leaked Architecture to Transform a 9B Model Into a Production Agent
Dev.to
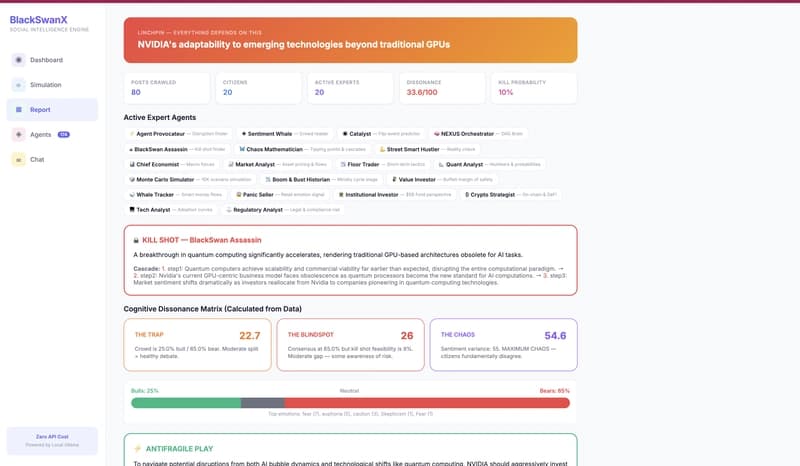
I built 174 AI agents that predict the future by fighting each other
Dev.to