Uncertainty-Aware Pedestrian Attribute Recognition via Evidential Deep Learning
arXiv cs.CV / 4/30/2026
📰 NewsModels & Research
Key Points
- The paper introduces UAPAR, a pedestrian attribute recognition framework that explicitly estimates uncertainty to improve robustness on low-quality or complex real-world inputs.
- UAPAR is built by integrating Evidential Deep Learning (EDL) into a CLIP-based architecture, using a region-aware evidence reasoning module to capture fine-grained local features for attribute-wise epistemic uncertainty.
- It adds an uncertainty-guided dual-stage curriculum learning strategy to reduce the negative impact of severe label noise during training.
- Experiments on PA100K, PETA, RAPv1, and RAPv2 show that UAPAR delivers competitive or better recognition performance, and qualitative results indicate its uncertainty estimates correlate with difficult or erroneous samples.
- The work claims to be the first EDL-based uncertainty-aware approach for pedestrian attribute recognition, differentiating it from prior deterministic methods that cannot judge prediction reliability.
Related Articles
Looking for feedback on OpenVidya: an open-source AI classroom layer for NCERT/CBSE [R]
Reddit r/MachineLearning
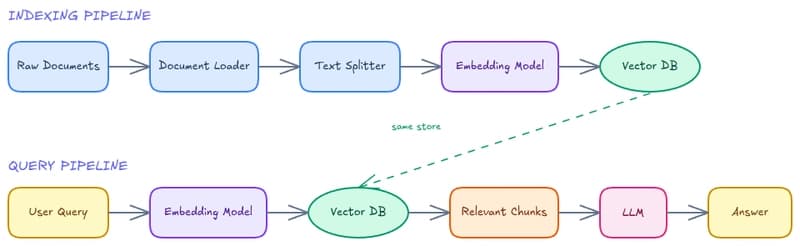
RAG Series (1): Why LLMs Need External Memory
Dev.to
One Open Source Project a Day (No. 54): Warp - The AI-Native Rust Terminal
Dev.to
One Open Source Project a Day (No. 53): pi-mono - Minimalist & High-Performance AI Coding Agent
Dev.to
Best Open Source Subtitle Generator? Canary Qwen 2.5B + Whisper Full Guide
Dev.to