Adversarial Robustness Analysis of Cloud-Assisted Autonomous Driving Systems
arXiv cs.RO / 4/7/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper analyzes how cloud-assisted autonomous driving can fail under cross-layer attacks that combine adversarial manipulation of perception models with vehicle-cloud network impairments.
- It introduces a hardware-in-the-loop IoV testbed that jointly emulates real-time perception, control, and communications to evaluate these vulnerabilities end-to-end.
- Using a YOLOv8 cloud object detector, whitebox FGSM and PGD attacks substantially reduce detection performance, with PGD at epsilon=0.04 dropping precision/recall from 0.73/0.68 to 0.22/0.15.
- The study shows that network delays of 150–250 ms (about 3–4 lost frames) and packet loss of 0.5–5% destabilize closed-loop control, causing delayed actuation and rule violations.
- Overall, the findings argue for designing cross-layer resilience rather than protecting perception or networking in isolation for cloud-assisted autonomous driving.
Related Articles

Big Tech firms are accelerating AI investments and integration, while regulators and companies focus on safety and responsible adoption.
Dev.to

Could it be that this take is not too far fetched?
Reddit r/LocalLLaMA
npm audit Is Broken — Here's the Claude Code Skill I Built to Fix It
Dev.to

Meta Launches Muse Spark: A New AI Model for Everyday Use
Dev.to
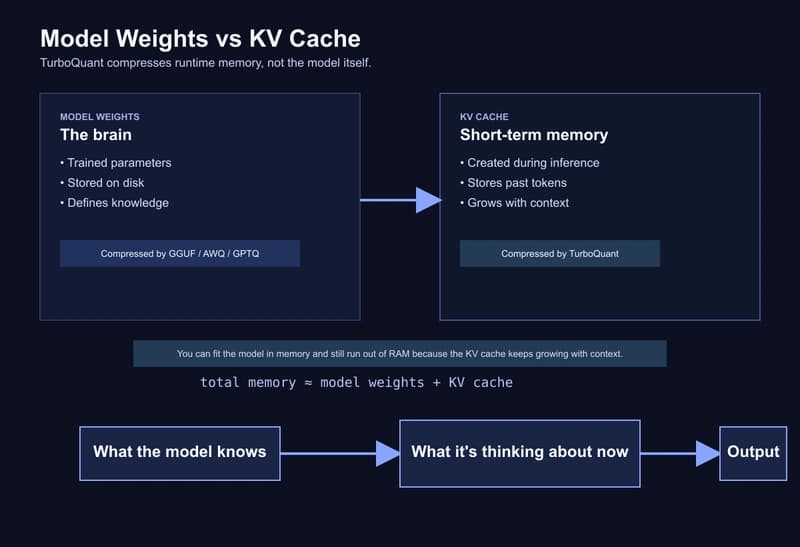
TurboQuant on a MacBook: building a one-command local stack with Ollama, MLX, and an automatic routing proxy
Dev.to