From Kinematics to Dynamics: Learning to Refine Hybrid Plans for Physically Feasible Execution
arXiv cs.RO / 4/15/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper studies robotic planning where a discrete sequence of spatial regions must be paired with a continuous trajectory that is physically feasible under constraints like deadlines, time windows, and motion limits.
Related Articles
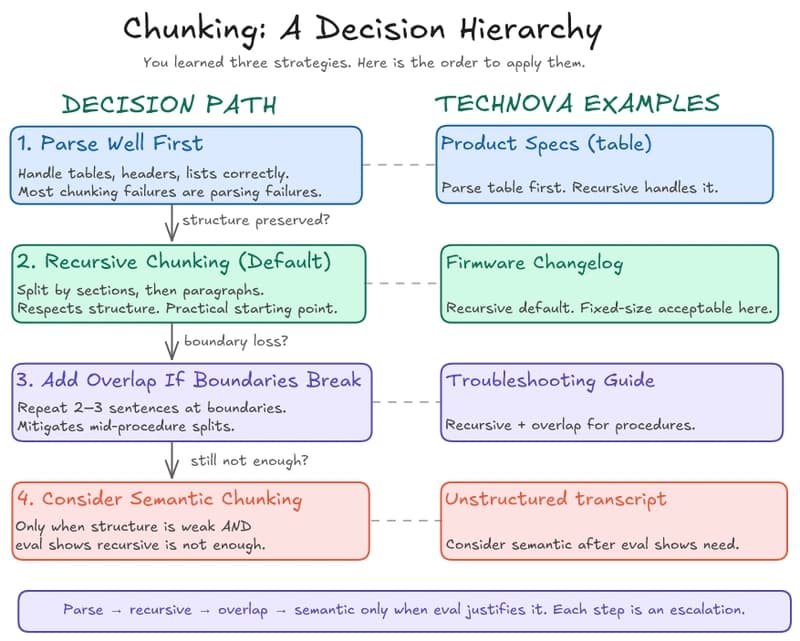
RAG in Practice — Part 4: Chunking, Retrieval, and the Decisions That Break RAG
Dev.to
Why dynamically routing multi-timescale advantages in PPO causes policy collapse (and a simple decoupled fix) [R]
Reddit r/MachineLearning
How AI Interview Assistants Are Changing Job Preparation in 2026
Dev.to
Consciousness in Artificial Intelligence: Insights from the Science ofConsciousness
Dev.to

NEW PROMPT INJECTION
Dev.to