Few-Shot Incremental 3D Object Detection in Dynamic Indoor Environments
arXiv cs.CV / 4/10/2026
💬 OpinionSignals & Early TrendsIdeas & Deep AnalysisModels & Research
Key Points
- The paper introduces FI3Det, a framework for few-shot incremental 3D object detection that targets dynamic indoor environments where new object classes appear over time.
- FI3Det uses vision-language models (VLMs) in a base stage to mine “unknown” objects and learn representations for unseen categories, including 2D semantic features and class-agnostic 3D bounding boxes.
- To reduce noise in mined representations, it adds a weighting mechanism that re-weights point- and box-level contributions based on spatial location and feature consistency.
- For classification, FI3Det proposes gated multimodal prototype imprinting by aligning 2D semantic and 3D geometric features to form prototypes and fuse multimodal classification signals for novel detection.
- Experiments with batch and sequential evaluation on ScanNet V2 and SUN RGB-D show consistent improvements over baseline methods, and the authors provide code on GitHub.
Related Articles

Black Hat Asia
AI Business
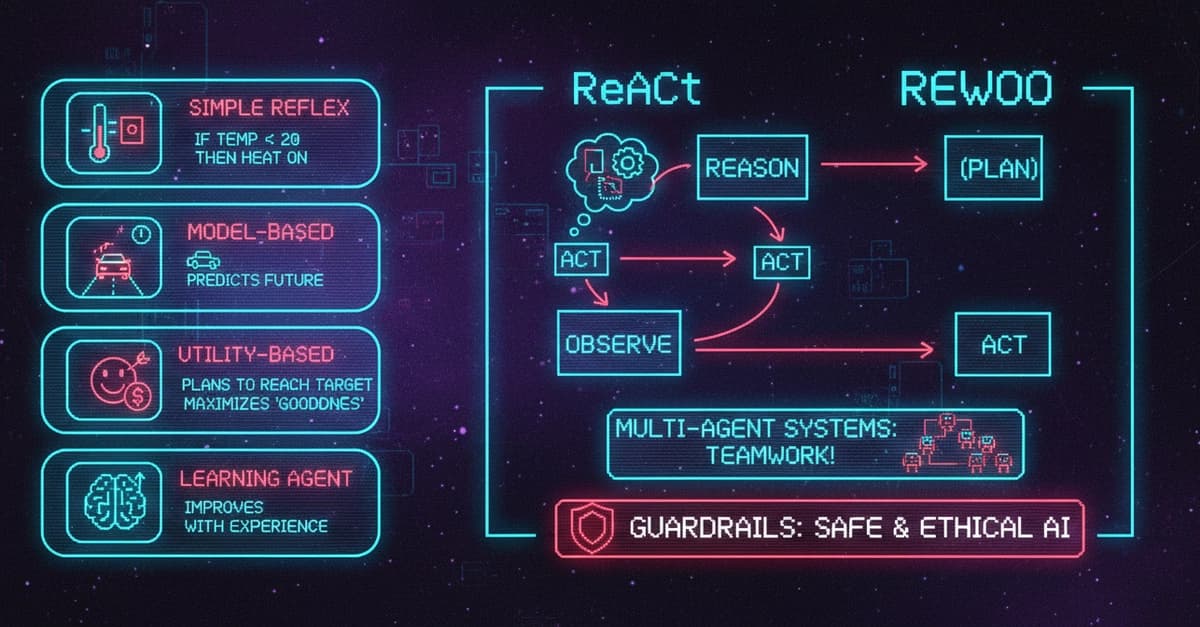
AI Agents Explained: 5 Types, Components, Frameworks, and Real-World Use Cases
Dev.to

Edge-to-Cloud Swarm Coordination for circular manufacturing supply chains with embodied agent feedback loops
Dev.to
Why QIS Is Not a Sync Problem: The Mailbox Model for Distributed Intelligence
Dev.to

The Ethics of AI: A Developer's Responsibility
Dev.to