Towards Safe and Robust Autonomous Vehicle Platooning: A Self-Organizing Cooperative Control Framework
arXiv cs.RO / 4/7/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper addresses the challenge of safe and robust autonomous vehicle (AV) platooning in hybrid traffic with human-driven vehicles (HDVs), where formation control and adaptability are difficult under dynamic conditions.
- It proposes TriCoD, a twin-world safety-enhanced Data-Model-Knowledge cooperative decision-making framework that combines deep reinforcement learning (DRL) with model-driven methods.
- TriCoD enables dynamic formation dissolution and reconfiguration using a safety-prioritized twin-world deduction mechanism to better handle emergency scenarios.
- The framework uses an adaptive switching mechanism to switch between data-driven and model-driven strategies in real time, improving flexibility and efficiency.
- Reported simulation and hardware-in-the-loop experiments indicate significant gains in safety, robustness, and adaptability for AV platooning.
Related Articles

Big Tech firms are accelerating AI investments and integration, while regulators and companies focus on safety and responsible adoption.
Dev.to

Could it be that this take is not too far fetched?
Reddit r/LocalLLaMA
npm audit Is Broken — Here's the Claude Code Skill I Built to Fix It
Dev.to

Meta Launches Muse Spark: A New AI Model for Everyday Use
Dev.to
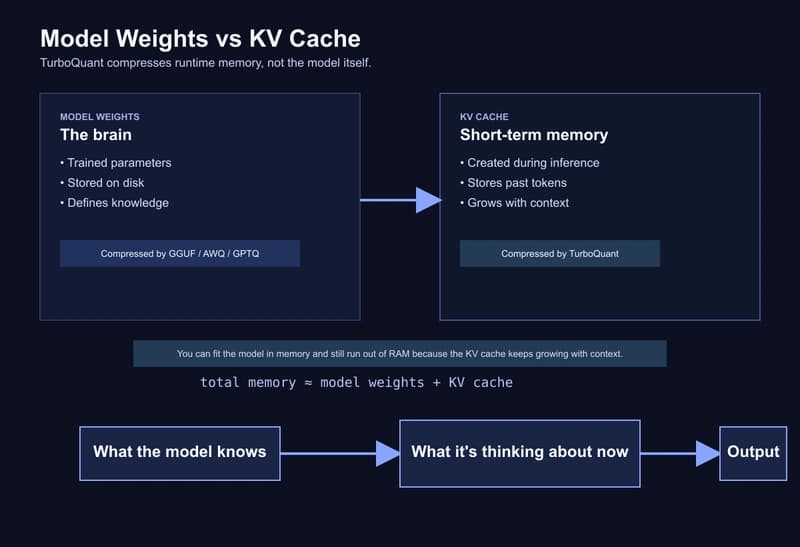
TurboQuant on a MacBook: building a one-command local stack with Ollama, MLX, and an automatic routing proxy
Dev.to