See Something, Say Something: Context-Criticality-Aware Mobile Robot Communication for Hazard Mitigations
arXiv cs.RO / 4/1/2026
📰 NewsIdeas & Deep AnalysisModels & Research
Key Points
- The paper addresses safety-critical communication for autonomous mobile robots, emphasizing that hazard alerts must account for both how critical the situation is and how time-sensitive it is.
- It proposes a context-sensitive framework that assesses criticality and mitigation feasibility to reduce the time to action and avoid delayed or miscalibrated responses.
- The approach uses VLM/LLM-driven perception to generate adaptive messages, such as giving a calm acknowledgment in a kitchen but issuing an urgent coordinated alert in a corridor.
- Experiments with a patrolling mobile robot across 60+ runs show improved response speed and a reported increase in user trust to 82% versus fixed-priority baselines, suggesting structured criticality assessment is effective.
Related Articles

Show HN: 1-Bit Bonsai, the First Commercially Viable 1-Bit LLMs
Dev.to

I Built an AI Agent That Can Write Its Own Tools When It Gets Stuck
Dev.to

Agent Self-Discovery: How AI Agents Find Their Own Wallets
Dev.to
[P] Federated Adversarial Learning
Reddit r/MachineLearning
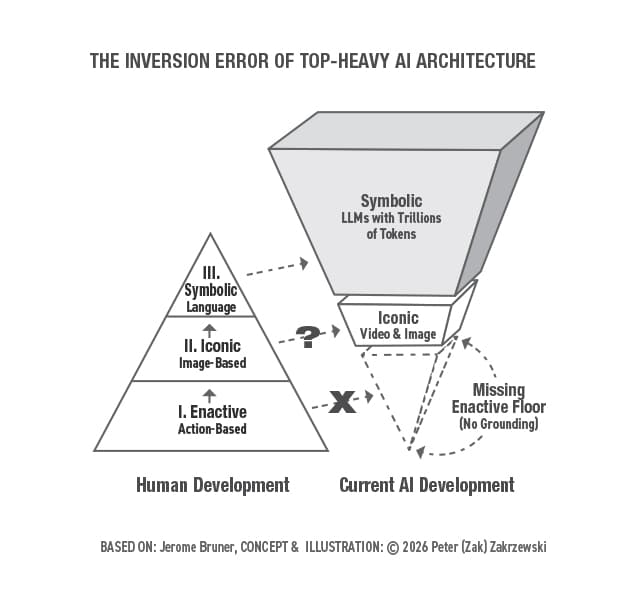
The Inversion Error: Why Safe AGI Requires an Enactive Floor and State-Space Reversibility
Towards Data Science