Industrial-Grade Robust Robot Vision for Screw Detection and Removal under Uneven Conditions
arXiv cs.RO / 4/1/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper proposes an industrial-robust robotic vision system for detecting and removing screws from air conditioner outdoor units in recycling settings where objects vary in size and are heavily degraded by dirt and rust.
- It combines a task-specific two-stage detection approach with a lattice-based local calibration strategy to maintain accurate screw localization without relying on pre-programmed coordinates.
- The method achieves 99.8% screw detection recall under severe image degradation and supports manipulation accuracy within ±0.75 mm.
- In real-world tests on 120 units, the system demonstrated a 78.3% disassembly success rate with an average cycle time of 193 seconds, supporting feasibility for industrial deployment.
Related Articles

Show HN: 1-Bit Bonsai, the First Commercially Viable 1-Bit LLMs
Dev.to

I Built an AI Agent That Can Write Its Own Tools When It Gets Stuck
Dev.to

Agent Self-Discovery: How AI Agents Find Their Own Wallets
Dev.to
[P] Federated Adversarial Learning
Reddit r/MachineLearning
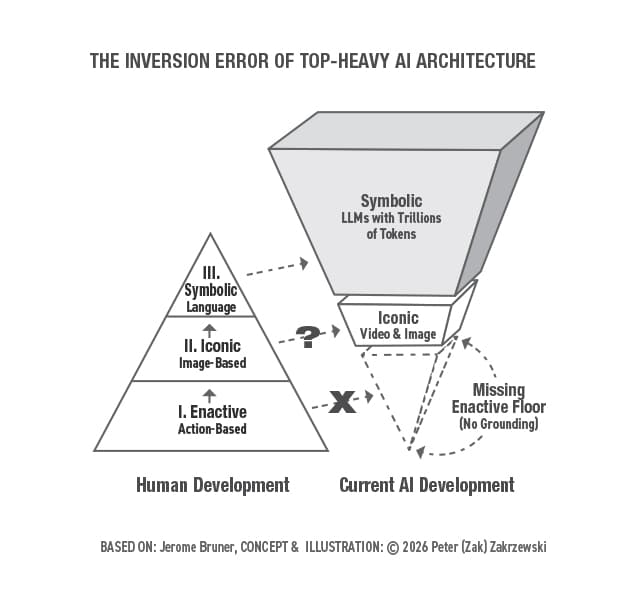
The Inversion Error: Why Safe AGI Requires an Enactive Floor and State-Space Reversibility
Towards Data Science