To Call or Not to Call: A Framework to Assess and Optimize LLM Tool Calling
arXiv cs.AI / 5/4/2026
📰 NewsIdeas & Deep AnalysisModels & Research
Key Points
- The paper argues that agentic LLM architectures gain power from external tools, but tool calls can also be redundant or harmful, making the “call vs. don’t call” decision central to effective use.
- It proposes a decision-theory-inspired framework to evaluate web search tool calls using three factors: necessity, utility, and affordability.
- The framework compares two perspectives—normative (inferring true need/utility from optimal tool-call allocation) and descriptive (inferring the model’s self-perceived need/utility from observed behavior)—and shows these often diverge.
- It introduces lightweight estimators trained from models’ hidden states to predict need and utility, enabling simple controllers that improve tool-call decision quality and yield better task performance across multiple tasks and models.
- Overall, the approach provides a principled method and measurable mechanism for optimizing LLM tool-calling rather than relying on the model’s internal, self-assessed judgments alone.
Related Articles
A very basic litmus test for LLMs "ok give me a python program that reads my c: and put names and folders in a sorted list from biggest to small"
Reddit r/LocalLLaMA
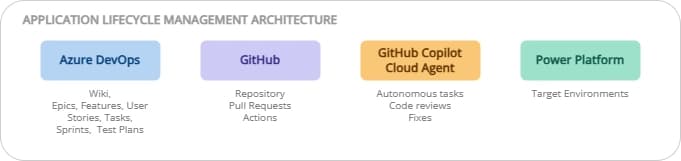
ALM on Power Platform: ADO + GitHub, the best of both worlds
Dev.to
Experiment: Does repeated usage influence ChatGPT 5.4 outputs in a RAG-like setup?
Dev.to
Find 12 high-volume, low-competition GEO content topics Topify.ai should rank on
Dev.to
When a memorized rule fits your bug too well: a meta-trap of agent workflows
Dev.to