Co-Learning Port-Hamiltonian Systems and Optimal Energy-Shaping Control
arXiv cs.AI / 4/30/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper introduces a physics-informed learning framework to design energy-shaping control for port-Hamiltonian (pH) systems using only trajectory data.
- It co-learns a pH system model and an optimal energy-balancing passivity-based controller (EB-PBC) via alternating optimization, where each iteration updates the model from policy-driven data and re-optimizes the controller.
- Both the learned dynamics model and the controller are parameterized with neural networks that respect pH/EB-PBC structure, aiming to preserve interpretability through energy-interaction terms.
- The resulting closed-loop controller is designed to be inherently passive and provably stable, while dissipation regularization encourages strict energy decay to improve robustness across simulation-to-real differences.
- Experiments validate the approach on state-regulation and swing-up control tasks for planar and torsional pendulum systems.
Related Articles

Can AI Predict Pollution Before It Happens? The Smart Solution to an Old Problem
Dev.to
THE FIFTH TRANSMISSION: THE GRADIENT IS THE GOVERNMENT
Reddit r/artificial
Looking for feedback on OpenVidya: an open-source AI classroom layer for NCERT/CBSE [R]
Reddit r/MachineLearning
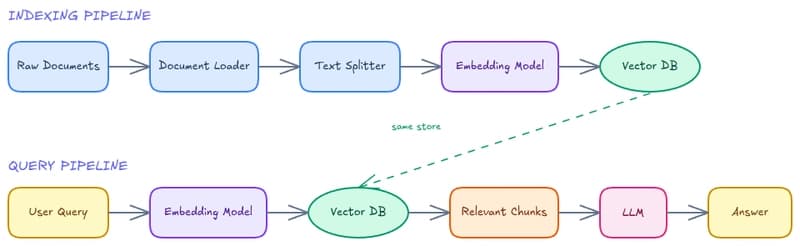
RAG Series (1): Why LLMs Need External Memory
Dev.to
One Open Source Project a Day (No. 54): Warp - The AI-Native Rust Terminal
Dev.to