OccSim: Multi-kilometer Simulation with Long-horizon Occupancy World Models
arXiv cs.AI / 4/1/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- OccSim introduces a data-driven, occupancy world model-driven 3D simulator that generates long-horizon driving scenes without relying on pre-recorded logs or HD maps, using only a single initial frame plus future ego actions.
- The system can stably produce more than 3,000 continuous frames, enabling simulation-based construction of large-scale 3D occupancy maps over 4 kilometers—over an 80x improvement versus prior occupancy world models’ stable generation length.
- OccSim is built from a W-DiT-based static occupancy world model that uses explicit rigid transformations to extend ultra-long-horizon environment synthesis, alongside a Layout Generator that populates reactive dynamic agents from synthesized road topology.
- Experiments suggest OccSim-generated data can be used to pre-train 4D semantic occupancy forecasting models, achieving up to 67% zero-shot performance on unseen data and improving over asset-based simulators by up to 11% (rising to ~74% and 22.1% when scaling the dataset 5x).
Related Articles

Show HN: 1-Bit Bonsai, the First Commercially Viable 1-Bit LLMs
Dev.to

I Built an AI Agent That Can Write Its Own Tools When It Gets Stuck
Dev.to

Agent Self-Discovery: How AI Agents Find Their Own Wallets
Dev.to
[P] Federated Adversarial Learning
Reddit r/MachineLearning
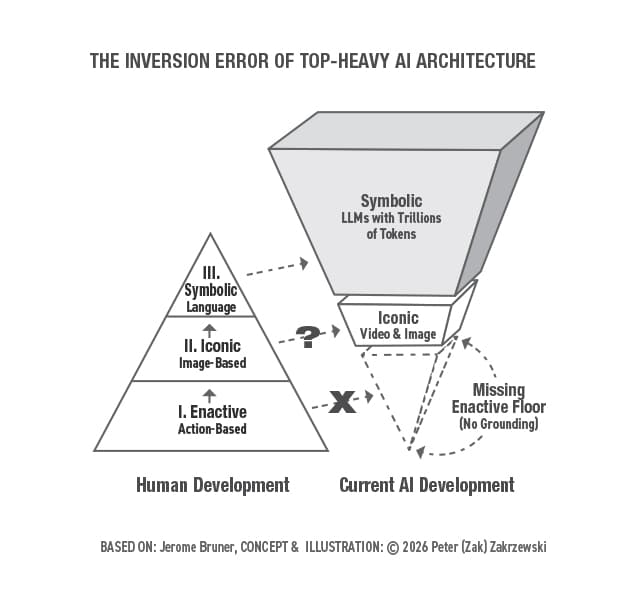
The Inversion Error: Why Safe AGI Requires an Enactive Floor and State-Space Reversibility
Towards Data Science