WaterSplat-SLAM: Photorealistic Monocular SLAM in Underwater Environment
arXiv cs.RO / 4/7/2026
📰 NewsIdeas & Deep AnalysisModels & Research
Key Points
- WaterSplat-SLAM is presented as a monocular underwater SLAM system aimed at improving both pose estimation robustness and photorealistic dense mapping compared with prior underwater methods.
- The approach couples semantic medium filtering with a two-view 3D reconstruction prior to better support underwater-adapted camera tracking and depth estimation.
- It introduces semantic-guided rendering and adaptive map management using an online medium-aware Gaussian map to model underwater scenes in a photorealistic yet compact representation.
- Experiments on multiple underwater datasets reportedly show strong camera tracking performance alongside high-fidelity rendering quality.
Related Articles

Big Tech firms are accelerating AI investments and integration, while regulators and companies focus on safety and responsible adoption.
Dev.to

Could it be that this take is not too far fetched?
Reddit r/LocalLLaMA
npm audit Is Broken — Here's the Claude Code Skill I Built to Fix It
Dev.to

Meta Launches Muse Spark: A New AI Model for Everyday Use
Dev.to
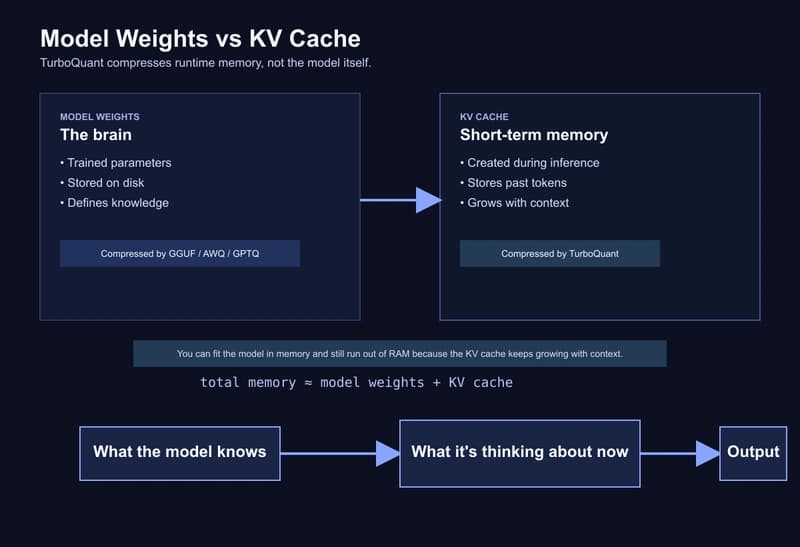
TurboQuant on a MacBook: building a one-command local stack with Ollama, MLX, and an automatic routing proxy
Dev.to