【量子AIが変える医療 #14】第5章 量子強化学習 手術ロボット(後編②)学習ループ後半
Qiita / 3/30/2026
💬 OpinionIdeas & Deep AnalysisTools & Practical Usage
Key Points
- 手術ロボットの量子強化学習における「学習ループ後半」の実装フローを、ステップ進行(env.max_steps)と行動選択の分岐(epsilon-greedy)として説明している。
- epsilon条件では一様乱数により関節角(env.n_joints)へランダム探索し、探索と活用の切り替えで学習効率を調整する方針を示している。
- 学習ループの活用側では torch.no_grad() を用いて推論(state→tensor化→Q/方策モデルによる action 推定)を行う流れが示され、学習/推論の計算モードを分けている。
- 量子コンピューティング×強化学習×医療ロボティクスという文脈で、Python/PyTorch系の実装パターンを軸に学習ループを具体化している。
- 記事は第5章の後編②として位置づけられ、前回までの流れを受けて後半部分(行動決定以降のループ処理)を補完する内容になっている。
for step in range(env.max_steps):
if random.random() < epsilon:
action = np.random.uniform(-1, 1, env.n_joints)
else:
with torch.no_grad(...
Continue reading this article on the original site.
Read original →Related Articles

Black Hat Asia
AI Business
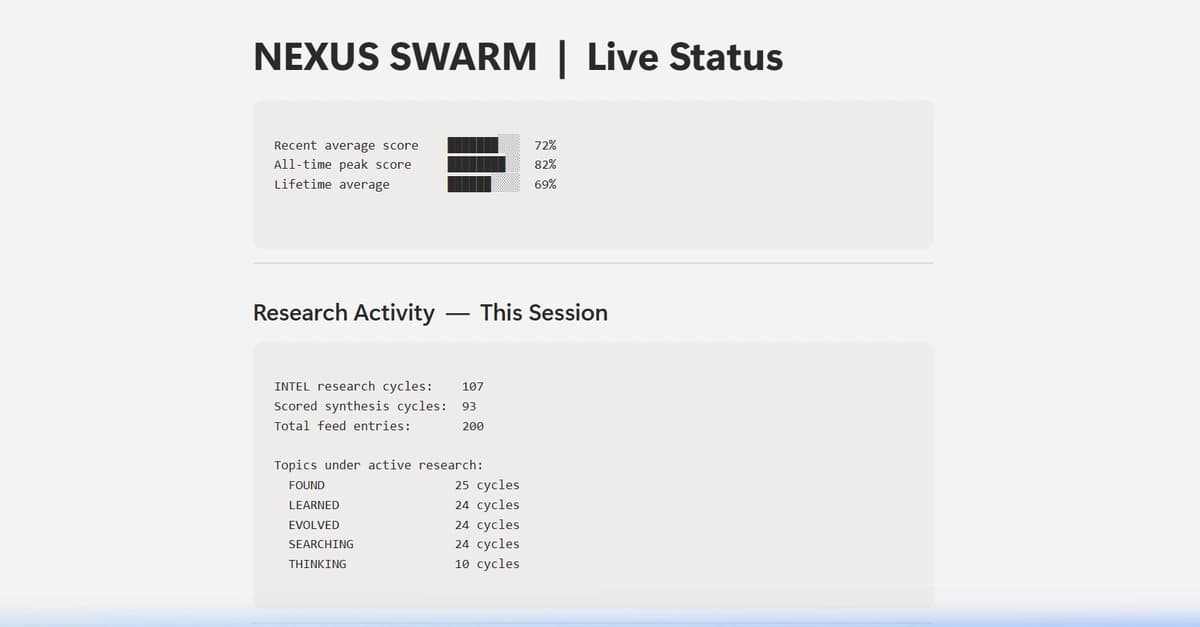
The Brand Gravity Anomaly: Uncovering AI Developer Friction with a 5-Organ Swarm and Notion MCP
Dev.to
Hyper-Personalization in Action: AI-Driven Media Lists
Dev.to
Learning Thermodynamics with Boltzmann Machines
Dev.to

Big Tech firms are accelerating AI investments and integration, while regulators and companies focus on safety and responsible adoption.
Dev.to