A Principled Approach for Creating High-fidelity Synthetic Demonstrations for Imitation Learning
arXiv cs.RO / 5/5/2026
📰 NewsDeveloper Stack & InfrastructureIdeas & Deep AnalysisModels & Research
Key Points
- The paper proposes a principled synthetic-demonstration method for imitation learning that preserves the expert trajectory rather than generating new motion with sampling planners or trajectory optimization that can drift away from the demonstrated path.
- It treats the expert trajectory as a strong prior by modeling it with Dynamic Movement Primitives (DMPs) and retargeting the motion to new goals, object configurations, and viewpoints while maintaining phase consistency and shape structure within a reconstructed 3DGS scene.
- To handle clutter and collisions safely, the authors introduce an analytic obstacle-aware DMP formulation that directly leverages the continuous density field produced by 3D Gaussian Splatting, enabling collision avoidance with minimal perturbation of the nominal expert motion.
- Experiments on a Spot mobile manipulator across three tasks with increasing sensitivity show that the proposed approach reduces trajectory deviation and collision rates and improves task success, particularly for diffusion-based visuomotor policy training.
Related Articles
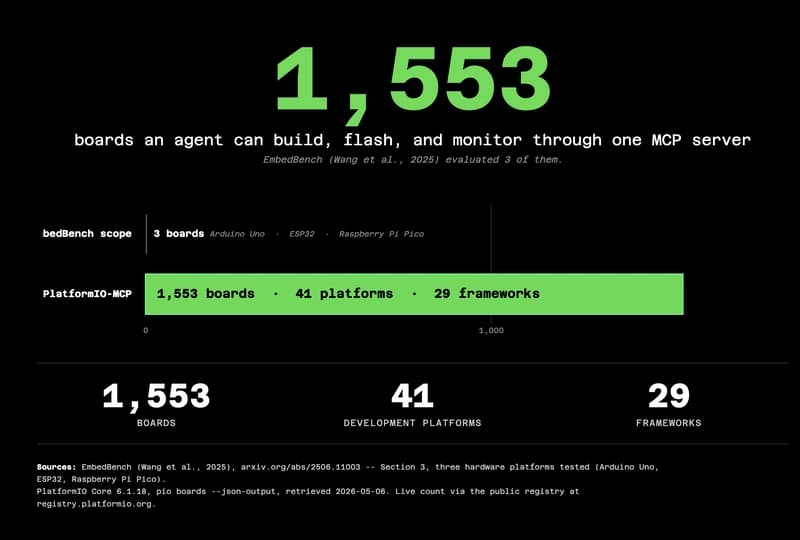
The 55.6% problem: why frontier LLMs fail at embedded code
Dev.to
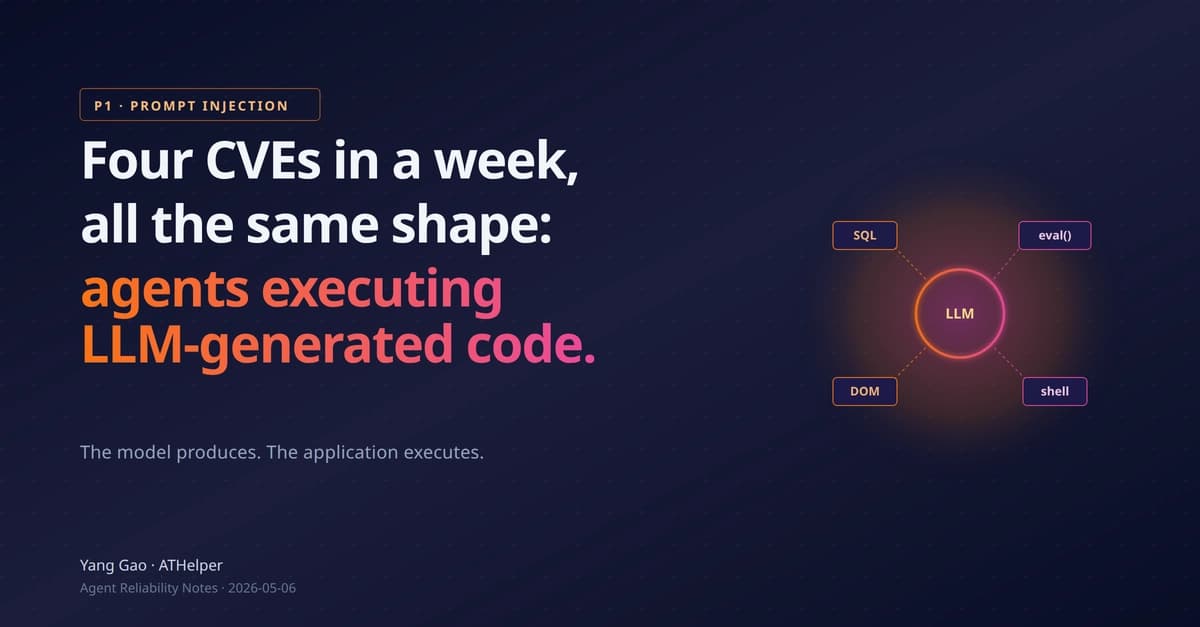
Four CVEs in a week, all the same shape: when agents execute LLM-generated code
Dev.to
Stop Burning Cash: How to Compress LLM Prompts by 60% in Real-Time | 0507-0255
Dev.to
Healthcare AI Is Absorbing Institutional Knowledge It Can't Actually Hold
Reddit r/artificial
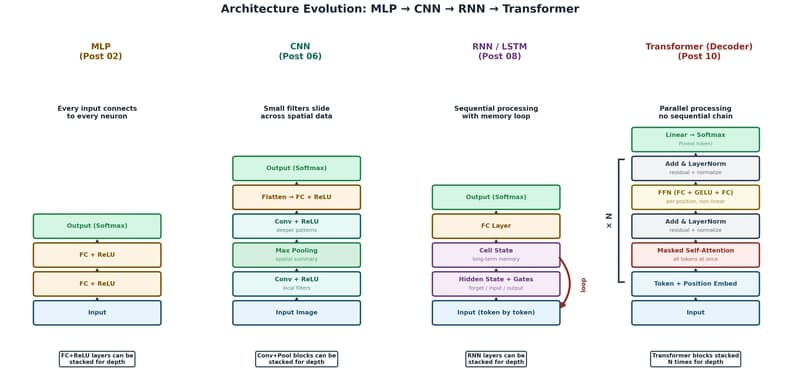
The Transformer: The Architecture Behind Modern AI
Dev.to