フィジカルAIニュース(2026/4/25号)

更新日:2026/4/25
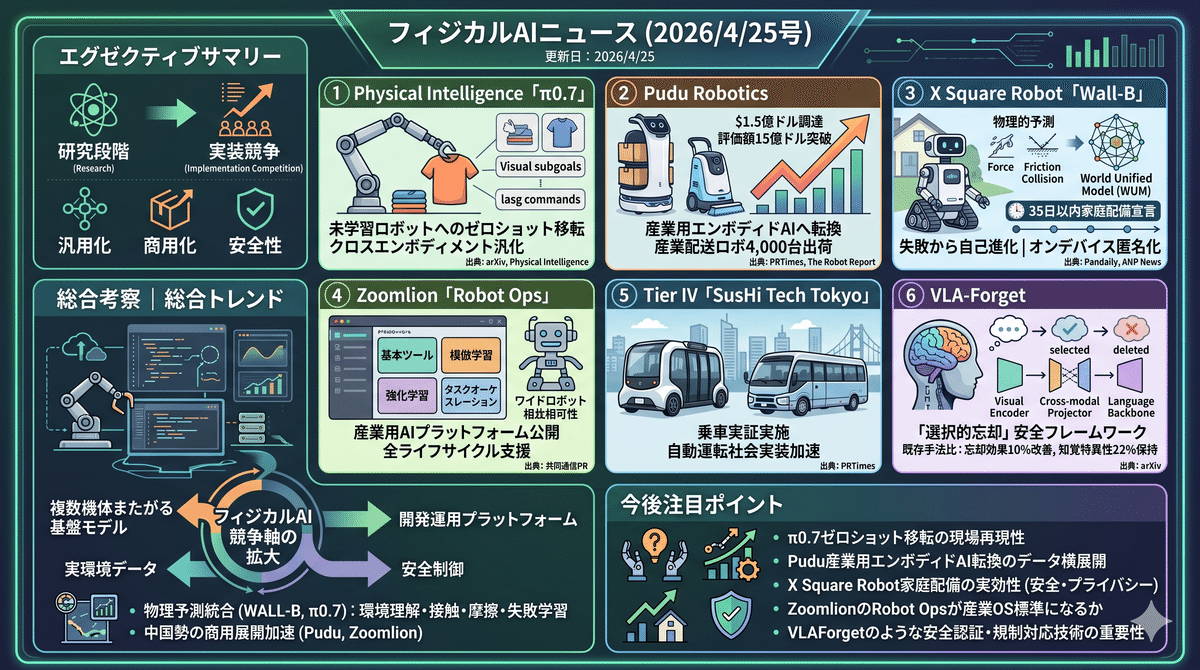
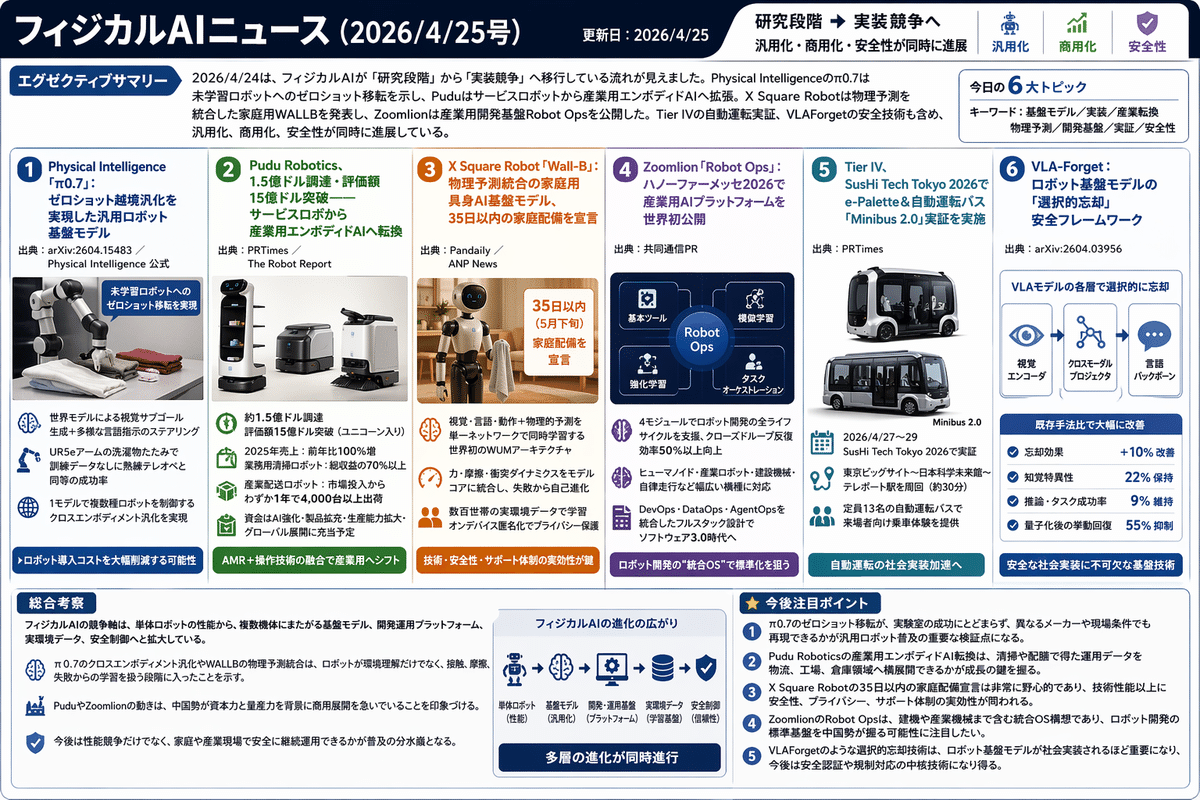
エグゼクティブサマリー
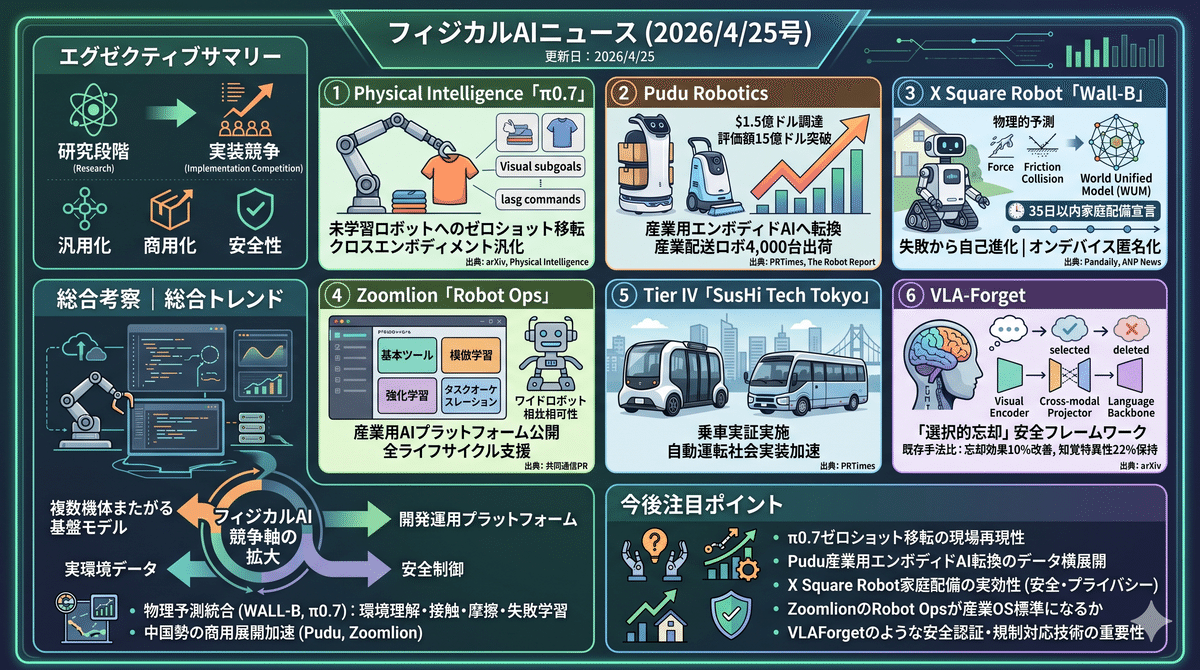
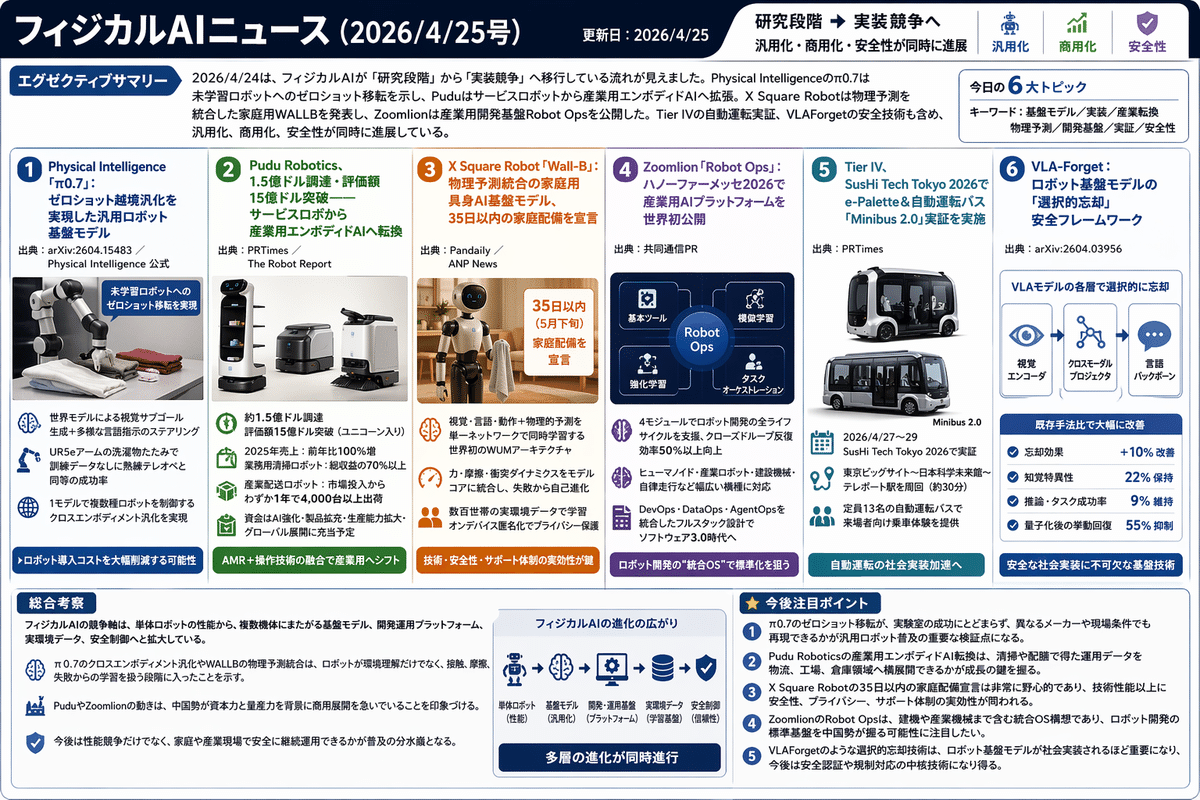
2026/4/24は、フィジカルAIが「研究段階」から「実装競争」へ移行している流れが見えました。Physical Intelligenceのπ0.7は未学習ロボットへのゼロショット移転を示し、Puduはサービスロボットから産業用エンボディドAIへ拡張。X Square Robotは物理予測を統合した家庭用WALLBを発表し、Zoomlionは産業用開発基盤Robot Opsを公開した。Tier IVの自動運転実証、VLAForgetの安全技術も含め、汎用化、商用化、安全性が同時に進展している。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ Physical Intelligence「π0.7」:ゼロショット越境汎化を実現した汎用ロボット基盤モデル
📎 出典:arXiv:2604.15483 / Physical Intelligence 公式
110億ドル規模の資金調達協議中のPhysical Intelligence(π)が発表したVLAモデル「π0.7」は、世界モデルによる視覚サブゴール生成と多様な言語指示を組み合わせたステアリング機構で、未学習ロボット機体へのゼロショット移転を実現。UR5e産業用アームの洗濯物たたみでは訓練データなしに熟練テレオペレーターと同等の成功率を達成。言語コーチングと視覚サブゴールの組み合わせで新タスクへの適応が可能であり、1モデルで複数種ロボットを制御するクロスエンボディメント汎化はロボット導入コストを大幅削減する可能性を示した。
2️⃣ Pudu Robotics、1.5億ドル調達・評価額15億ドル突破:サービスロボから産業用エンボディドAIへ転換
📎 出典:PRTimes / The Robot Report
深センを拠点とする商用サービスロボット大手Pudu Roboticsが新ラウンドで約1.5億ドルを調達し、評価額が15億ドルを突破してユニコーン入りを果たした。2025年の売上は前年比100%増を達成し、業務用清掃ロボットが総収益の70%以上を占める。調達資金はAI技術強化・製品拡充・生産能力拡大・グローバル展開に充当予定。従来の配膳・清掃特化からAMRと操作技術を融合した産業用エンボディドAIへの転換を明確化し、産業配送ロボットは市場投入からわずか1年で4,000台以上出荷されるなど急速に普及している。
3️⃣ X Square Robot「Wall-B」:物理予測統合の家庭用具身AI基盤モデル、35日以内の家庭配備を宣言
📎 出典:Pandaily / ANP News
中国X Square Robotが、視覚・言語・動作に加え「物理的予測(Physical Prediction)」を単一ネットワークで同時学習する世界初のWUM(World Unified Model)アーキテクチャ搭載家庭用具身AI基盤モデル「WALL-B」を発表。従来のVLAアーキテクチャから転換し、力・摩擦・衝突ダイナミクスをモデルコアに組み込むことで失敗から自己進化する能力を実現。数百世帯の実環境データで学習し、プライバシー保護のためのオンデバイス匿名化処理も実装。CEO王謙氏が35日以内(5月下旬)の一般家庭配備を宣言しており実現可否が注目される。
4️⃣ Zoomlion「Robot Ops」:ハノーファーメッセ2026で産業用AIプラットフォームを世界初公開
📎 出典:共同通信PR
中国重機メーカーZoomlionがハノーファーメッセ2026で具身知能OSプラットフォーム「Robot Ops」を世界初公開。基本ツール・模倣学習・強化学習・タスクオーケストレーションの4モジュールでロボット開発の全ライフサイクルを支援し、クローズドループ反復効率50%以上向上を謳う。ヒューマノイド・産業ロボット・建設機械・自律走行など幅広い機種に対応する単一プラットフォームとして汎用性を訴求。DevOps・DataOps・AgentOpsを統合したソフトウェア3.0時代向けのフルスタック設計が特徴。
5️⃣ Tier IV、SusHi Tech Tokyo 2026でe-Palette&自動運転バス「Minibus 2.0」実証を実施
📎 出典:PRTimes
自動運転ソリューション企業Tier IVが2026年4月27〜29日のSusHi Tech Tokyo 2026で、トヨタ製次世代モビリティ「e-Palette」を展示ブースに展示し、搭載予定の自動運転システムや全国での社会実装事例を紹介。会場周辺では自動運転バス「Minibus 2.0」(定員13名)を用い、東京ビッグサイト〜日本科学未来館〜テレポート駅を周回する約30分の来場者向け乗車実証も実施。東京臨海部での実車体験を通じ自動運転の社会実装加速への足がかりとする。
6️⃣ VLA-Forget:ロボット基盤モデルの「選択的忘却」安全フレームワーク
📎 出典:arXiv:2604.03956
VLAモデルから不適切な行動や機密情報を、視覚エンコーダ・クロスモーダルプロジェクタ・言語バックボーンの各層で選択的に削除するハイブリッド手法「VLA-Forget」を提案。比率対応型の選択的編集と層選択型の推論/動作アンラーニングを組み合わせることで、既存手法と比較して忘却効果を10%改善、知覚特異性を22%保持、推論・タスク成功率を9%維持し、量子化後の挙動回復も55%抑制。VLAモデルの安全な社会実装に向けた基盤技術として位置づけられる。
総合考察
2026/4/2のトピック4から見えた特長は、フィジカルAIの競争軸が単体ロボットの性能から、複数機体にまたがる基盤モデル、開発運用プラットフォーム、実環境データ、安全制御へ広がっていることが読み取れました。特にπ0.7のクロスエンボディメント汎化やWALLBの物理予測統合は、ロボットが環境理解だけでなく、接触、摩擦、失敗からの学習を扱う段階に入ったことを示す。一方で、PuduやZoomlionの動きは、中国勢が資本力と量産力を背景に商用展開を急いでいることを印象づける。今後は性能競争だけでなく、家庭や産業現場で安全に継続運用できるかが普及の分水嶺となる。
今後注目ポイント
π0.7のゼロショット移転が、実験室の成功にとどまらず、異なるメーカーや現場条件でも再現できるかが汎用ロボット普及の重要な検証点になる。
Pudu Roboticsの産業用エンボディドAI転換は、清掃や配膳で得た運用データを物流、工場、倉庫領域へ横展開できるかが成長の鍵を握る。
X Square Robotの35日以内の家庭配備宣言は非常に野心的であり、技術性能以上に安全性、プライバシー、サポート体制の実効性が問われる。
ZoomlionのRobot Opsは、建機や産業機械まで含む統合OS構想であり、ロボット開発の標準基盤を中国勢が握る可能性に注目したい。
VLAForgetのような選択的忘却技術は、ロボット基盤モデルが社会実装されるほど重要になり、今後は安全認証や規制対応の中核技術になり得る。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #2026年
- #自動運転
- #フィジカルAI
- #強化学習
- #アンラーニング
- #社会実装
- #devops
- #AI最新情報
- #2026年4月
- #PhysicalAI
- #世界モデル
- #AMR
- #産業用ロボット
- #エンボディドAI
- #家庭用ロボット
- #模倣学習
- #産業DX
- #AgentOps
- #ロボット基盤モデル
- #汎用ロボット
- #DataOps
- #VLAモデル
- #PhysicalIntelligence
- #業務用清掃ロボット
- #ePalette
- #具身知能
- #TIERIV
- #PuduRobotics
- #中国ロボティクス
- #SusHiTechTokyo2026
- #クロスエンボディメント
- #言語コーチング
- #ロボット安全性
- #ゼロショット汎化
- #XSquareRobot
- #選択的忘却
- #物理予測
- #Zoomlion
- #RobotOps
- #視覚サブゴール
- #パイゼロセブン
- #商用サービスロボット
- #WALLB
- #WorldUnifiedModel
- #オンデバイス匿名化
- #タスクオーケストレーション
- #Minibus20
- #VLAForget
この記事は noteマネー にピックアップされました