Deep Gaussian Processes for Functional Maps
arXiv stat.ML / 4/7/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper tackles function-on-function regression (learning mappings between functional spaces) and highlights limitations of existing methods in modeling complex nonlinear relationships and producing well-calibrated uncertainty under noisy, sparse, or irregular sampling.
- It introduces Deep Gaussian Processes for Functional Maps (DGPFM), which applies a sequence of Gaussian-process-based linear and nonlinear transformations directly in function space using kernel integral transforms and GP conditional means.
- A key implementation insight is that, with fixed evaluation locations, discrete approximations of kernel integral transforms simplify to functional integral transforms, enabling flexible transform designs without major structural changes.
- For scalable probabilistic inference, DGPFM uses inducing points and whitening transformations within a variational learning framework.
- Experiments on synthetic and real benchmarks report improved predictive accuracy and better uncertainty calibration compared with prior approaches.
Related Articles

Big Tech firms are accelerating AI investments and integration, while regulators and companies focus on safety and responsible adoption.
Dev.to

Could it be that this take is not too far fetched?
Reddit r/LocalLLaMA
npm audit Is Broken — Here's the Claude Code Skill I Built to Fix It
Dev.to

Meta Launches Muse Spark: A New AI Model for Everyday Use
Dev.to
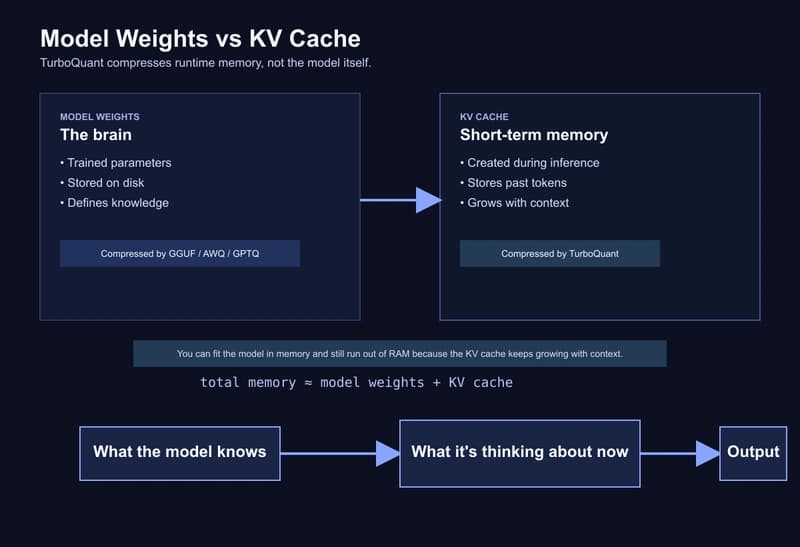
TurboQuant on a MacBook: building a one-command local stack with Ollama, MLX, and an automatic routing proxy
Dev.to