Beyond Hard Constraints: Budget-Conditioned Reachability For Safe Offline Reinforcement Learning
arXiv cs.AI / 3/25/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper studies safe reinforcement learning in Markov Decision Processes where agents must balance reward maximization with safety constraints that can otherwise create unstable optimization behavior.
- It extends safety reachability analysis beyond “hard” one-step safety constraints by introducing a safety-conditioned reachability set that accounts for cumulative (budgeted) safety costs.
- The proposed approach avoids unstable min/max and Lagrangian optimization by enforcing safety constraints through the precomputed reachability structure.
- It presents a new offline safe RL algorithm that learns a policy from a fixed dataset without any environment interaction, using the safety-conditioned reachability set.
- Experiments on offline safe RL benchmarks and a maritime navigation task show performance that matches or exceeds existing baselines while maintaining safety guarantees.
Related Articles
CRM Development That Drives Growth
Dev.to
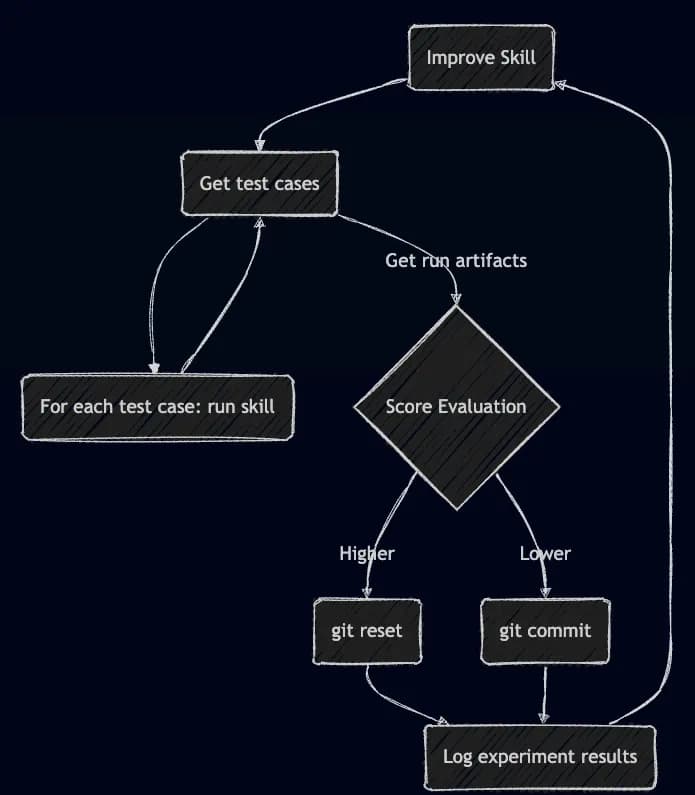
Karpathy's Autoresearch: Improving Agentic Coding Skills
Dev.to

How to Write AI Prompts That Actually Work
Dev.to
[D] Any other PhD students feel underprepared and that the bar is too low?
Reddit r/MachineLearning
Automating the Perfect Pitch: An AI Framework for Boutique PR
Dev.to