AsyncShield: A Plug-and-Play Edge Adapter for Asynchronous Cloud-based VLA Navigation
arXiv cs.RO / 4/28/2026
📰 NewsDeveloper Stack & InfrastructureSignals & Early TrendsModels & Research
Key Points
- The paper introduces AsyncShield, a plug-and-play edge adapter that enables Vision-Language-Action (VLA) robot navigation in cloud deployments where network jitter and latency can otherwise cause spatiotemporal misalignment and collisions.
- Instead of relying on black-box time-series prediction, AsyncShield uses a deterministic “white-box” spatial mapping: it keeps a temporal pose buffer and applies kinematic transformations to convert temporal lag into spatial pose offsets that restore the VLA’s geometric intent.
- The framework formulates the edge adaptation as a constrained Markov decision process (CMDP) and solves it with a PPO-Lagrangian approach to dynamically balance intent tracking against high-frequency LiDAR obstacle-avoidance safety constraints.
- Experiments in both simulation and real-world settings show zero-shot, robust generalization—improving navigation success rate and physical safety without fine-tuning cloud-based foundation models.
Related Articles

Can AI Predict Pollution Before It Happens? The Smart Solution to an Old Problem
Dev.to
THE FIFTH TRANSMISSION: THE GRADIENT IS THE GOVERNMENT
Reddit r/artificial
Looking for feedback on OpenVidya: an open-source AI classroom layer for NCERT/CBSE [R]
Reddit r/MachineLearning
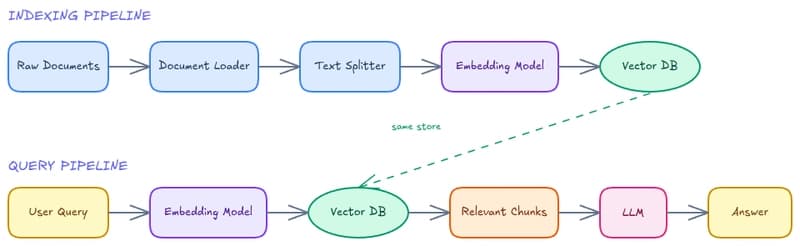
RAG Series (1): Why LLMs Need External Memory
Dev.to
One Open Source Project a Day (No. 54): Warp - The AI-Native Rust Terminal
Dev.to