Attention-Based Neural-Augmented Kalman Filter for Legged Robot State Estimation
arXiv cs.RO / 5/5/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper introduces AttenNKF, an Attention-Based Neural-Augmented Kalman Filter designed to improve state estimation for legged robots under foot-slip conditions.
- Since slip breaks the no-slip kinematic assumption and biases measurements during the Kalman update, the method explicitly estimates slip-induced error.
- AttenNKF augments an Invariant Extended Kalman Filter (InEKF) with a neural attention-based compensator that infers error from foot-slip severity and applies a post-update correction to the filter state.
- The compensator is trained in a latent space to reduce sensitivity to raw input scaling and to produce structured slip-conditioned compensation while keeping the original InEKF recursion intact.
- Experiments on legged-robot state estimation show better performance than existing estimators, with the gains being most pronounced in slip-prone scenarios.
Related Articles
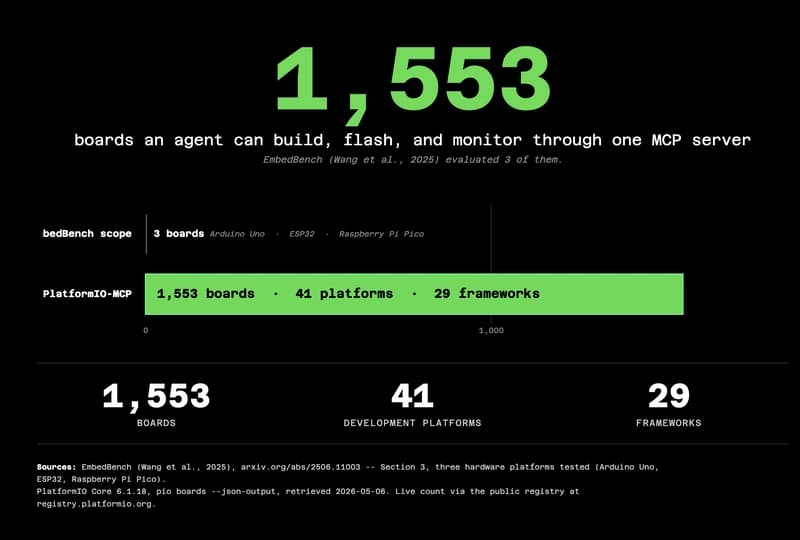
The 55.6% problem: why frontier LLMs fail at embedded code
Dev.to
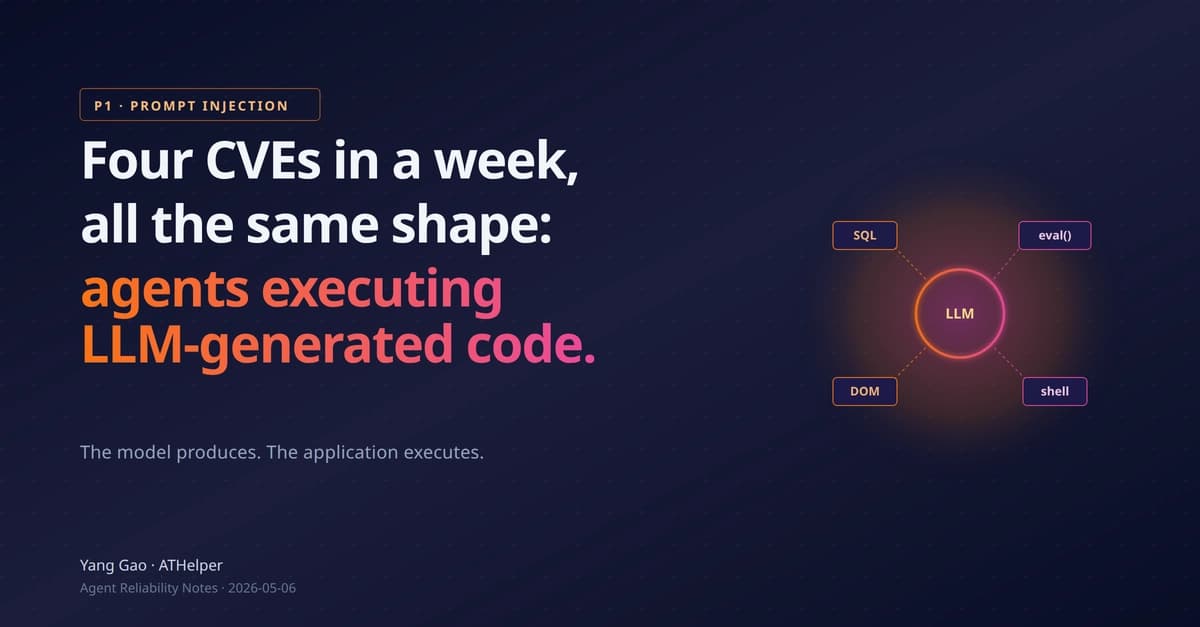
Four CVEs in a week, all the same shape: when agents execute LLM-generated code
Dev.to
Healthcare AI Is Absorbing Institutional Knowledge It Can't Actually Hold
Reddit r/artificial
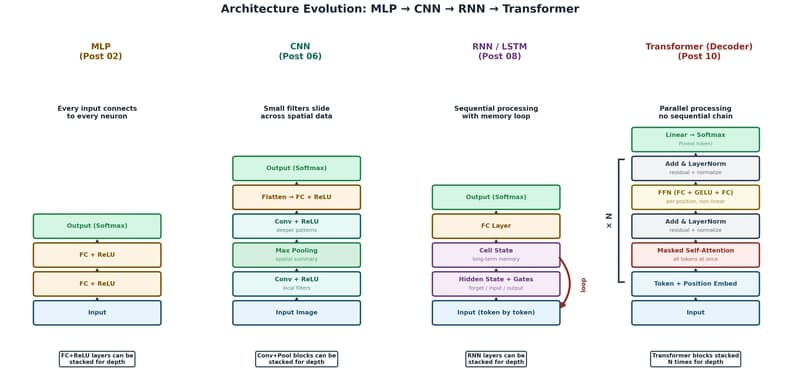
The Transformer: The Architecture Behind Modern AI
Dev.to

Foundational Models Defining a New Era in Vision: A Survey and Outlook
Dev.to