A Robust SINDy Autoencoder for Noisy Dynamical System Identification
arXiv stat.ML / 4/7/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper proposes a “robust SINDy autoencoder” that extends Sparse Identification of Nonlinear Dynamics (SINDy) to handle noisy measurements more reliably than standard sparse regression approaches.
- It addresses SINDy’s dependence on having sparse dynamics in an appropriate coordinate system by learning reduced/latent coordinates via an autoencoder while simultaneously discovering governing equations.
- A key contribution is the addition of a noise-separation module inspired by noise-separating neural network architectures to improve robustness to measurement error.
- Numerical experiments on the Lorenz system demonstrate that the method can recover interpretable latent dynamics and estimate measurement noise from noisy observations.
Related Articles
Research with ChatGPT
Dev.to
Silicon Valley is quietly running on Chinese open source models and almost nobody is talking about it
Reddit r/LocalLLaMA
Why AI Product Quality Is Now an Evaluation Pipeline Problem, Not a Model Problem
Dev.to
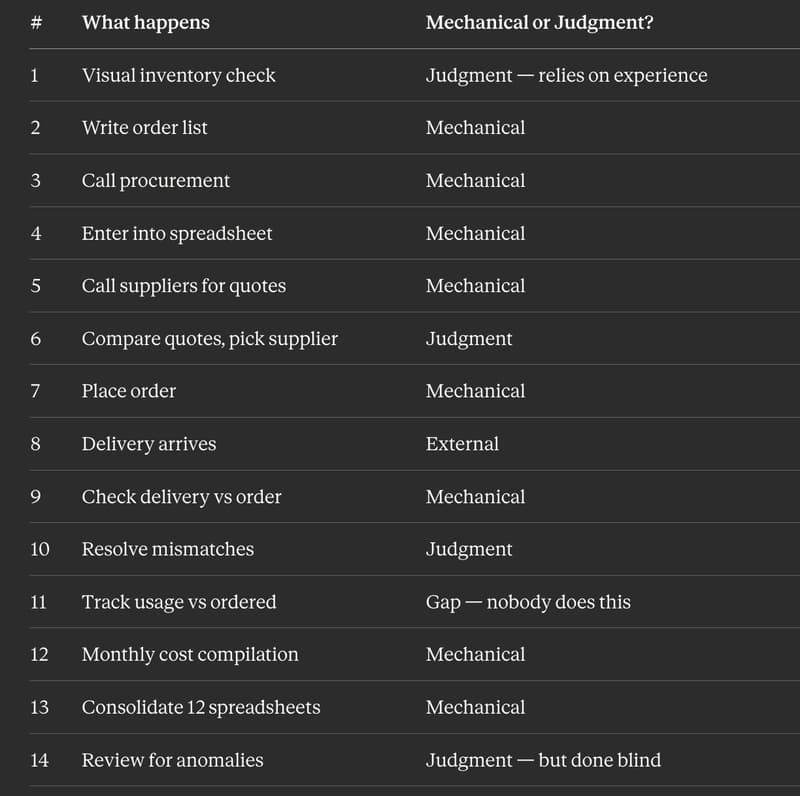
I Replaced 12 Kitchen Managers Guessing "How Much Chicken Do We Need" With 3 ML Models. Here's the Entire Architecture.
Dev.to
AI Model Router API - REST + MCP, Free Tier
Dev.to