Passive iFIR filters for data-driven velocity control in robotics
arXiv cs.RO / 4/1/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The learned controllers enforce closed-loop stability through passivity constraints and are reported to outperform an optimized VRFT-tuned PID baseline on a Franka Research 3 robot in both joint-space and Cartesian-space velocity tracking.
Related Articles

Show HN: 1-Bit Bonsai, the First Commercially Viable 1-Bit LLMs
Dev.to

I Built an AI Agent That Can Write Its Own Tools When It Gets Stuck
Dev.to

Agent Self-Discovery: How AI Agents Find Their Own Wallets
Dev.to
[P] Federated Adversarial Learning
Reddit r/MachineLearning
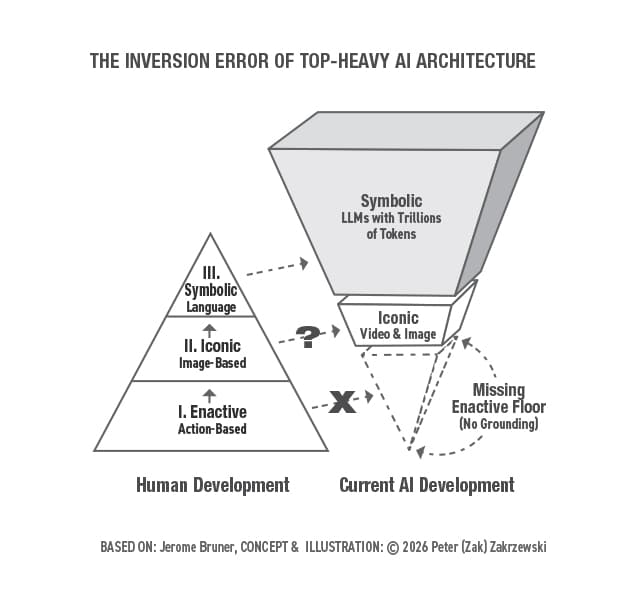
The Inversion Error: Why Safe AGI Requires an Enactive Floor and State-Space Reversibility
Towards Data Science