Natural Gradient Gaussian Approximation Filter on Lie Groups for Robot State Estimation
arXiv cs.RO / 4/14/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper targets improved robot state estimation on Lie group manifolds by avoiding the local tangent-space linearization used by many existing manifold filters, which can accumulate errors over time.
- It reformulates manifold filtering as parameter optimization over a Gaussian-distributed increment variable that is mapped to the Lie group via the exponential operator, updating the posterior through multiplicative group actions.
- It introduces a Natural Gradient Gaussian Approximation on Lie Groups (NANO-L) filter that uses a natural-gradient optimization scheme based on the Fisher information matrix to account for manifold/tangent-space curvature.
- For invariant observation models commonly used in robotic localization, the authors derive an exact closed-form covariance update in NANO-L, removing the need for iterative covariance updates and boosting computational efficiency.
- Experiments on a Unitree GO2 legged robot across varied terrains show about 40% lower estimation error than commonly used filters at similar computational cost.
Related Articles
The AI Hype Cycle Is Lying to You About What to Learn
Dev.to

Big Tech firms are accelerating AI investments and integration, while regulators and companies focus on safety and responsible adoption.
Dev.to

Inside NVIDIA’s $2B Marvell Deal: What NVLink Fusion Means for AI Ethernet Fabrics
Dev.to
Automating Your Literature Review: From PDFs to Data with AI
Dev.to
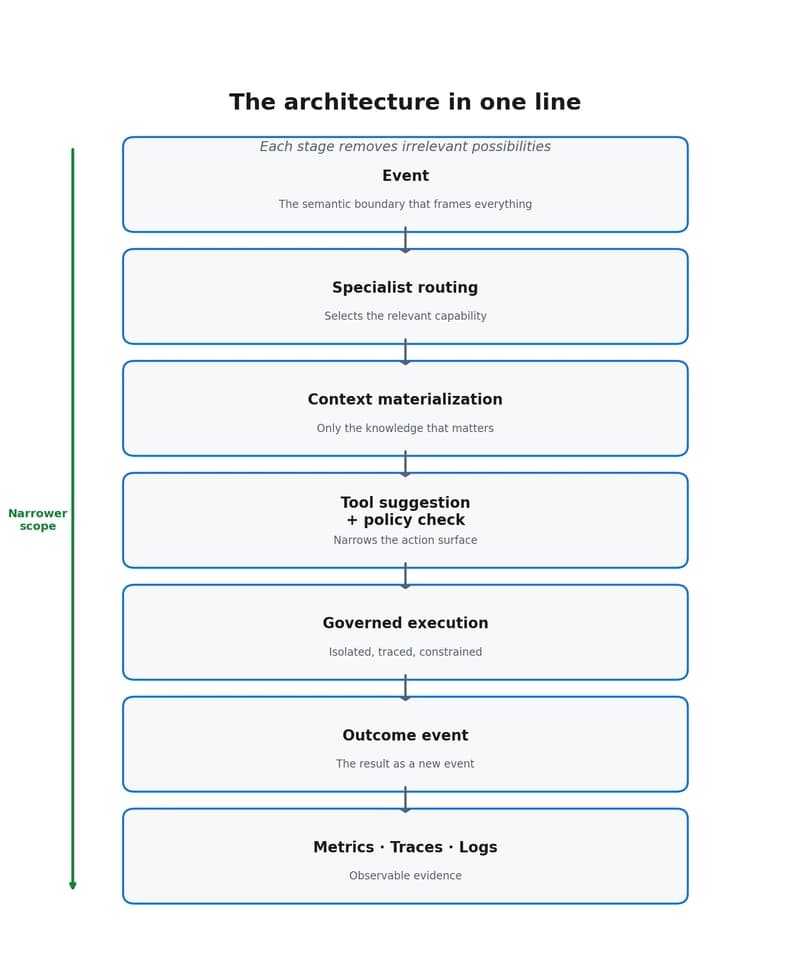
Why event-driven agents reduce scope, cost, and decision dispersion
Dev.to