An RTK-SLAM Dataset for Absolute Accuracy Evaluation in GNSS-Degraded Environments
arXiv cs.RO / 4/9/2026
📰 NewsIdeas & Deep AnalysisModels & Research
Key Points
- The paper argues that the common SLAM evaluation metric ATE can be misleading for RTK-SLAM because it applies an optimal SE(3) alignment that absorbs global drift and systematic errors.
- It introduces a geodetically referenced RTK-SLAM dataset and evaluation methodology that decouple GNSS/RTK from ground truth by using an RTK receiver only as an input while obtaining ground truth from a geodetic total station.
- The dataset includes two scenes collected with a handheld RTK-SLAM device and is designed to better expose how absolute positioning accuracy behaves in GNSS-degraded environments.
- Experiments across multiple RTK-SLAM variants (LiDAR-inertial, visual-inertial, and LiDAR-visual-inertial) plus standalone RTK show that SE(3) alignment can underestimate absolute error by up to 76%.
- Results indicate RTK-SLAM retains centimeter-to-decimeter global accuracy where standalone RTK degrades sharply (to tens of meters indoors), and the dataset, calibration files, and scripts are publicly released.
Related Articles

Big Tech firms are accelerating AI investments and integration, while regulators and companies focus on safety and responsible adoption.
Dev.to

Could it be that this take is not too far fetched?
Reddit r/LocalLLaMA
npm audit Is Broken — Here's the Claude Code Skill I Built to Fix It
Dev.to

Meta Launches Muse Spark: A New AI Model for Everyday Use
Dev.to
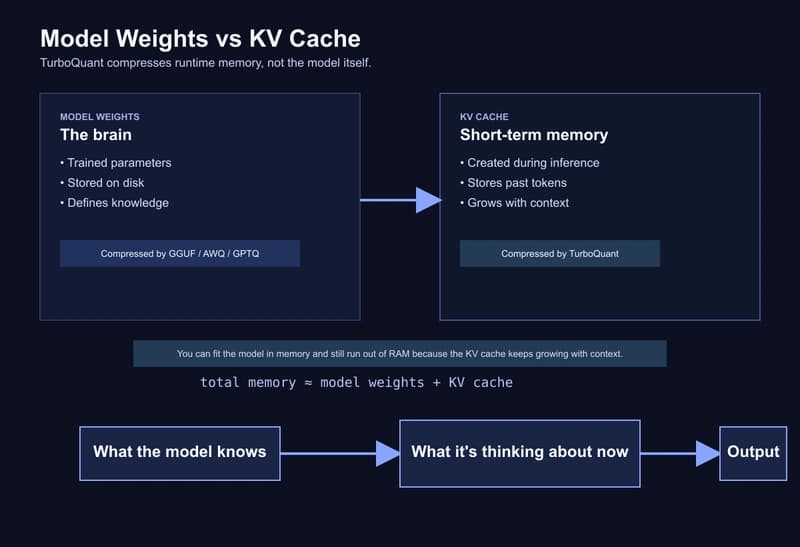
TurboQuant on a MacBook: building a one-command local stack with Ollama, MLX, and an automatic routing proxy
Dev.to