
フィジカルAIニュース(2026/4/11号)

更新日:2026/4/11
エグゼクティブサマリー
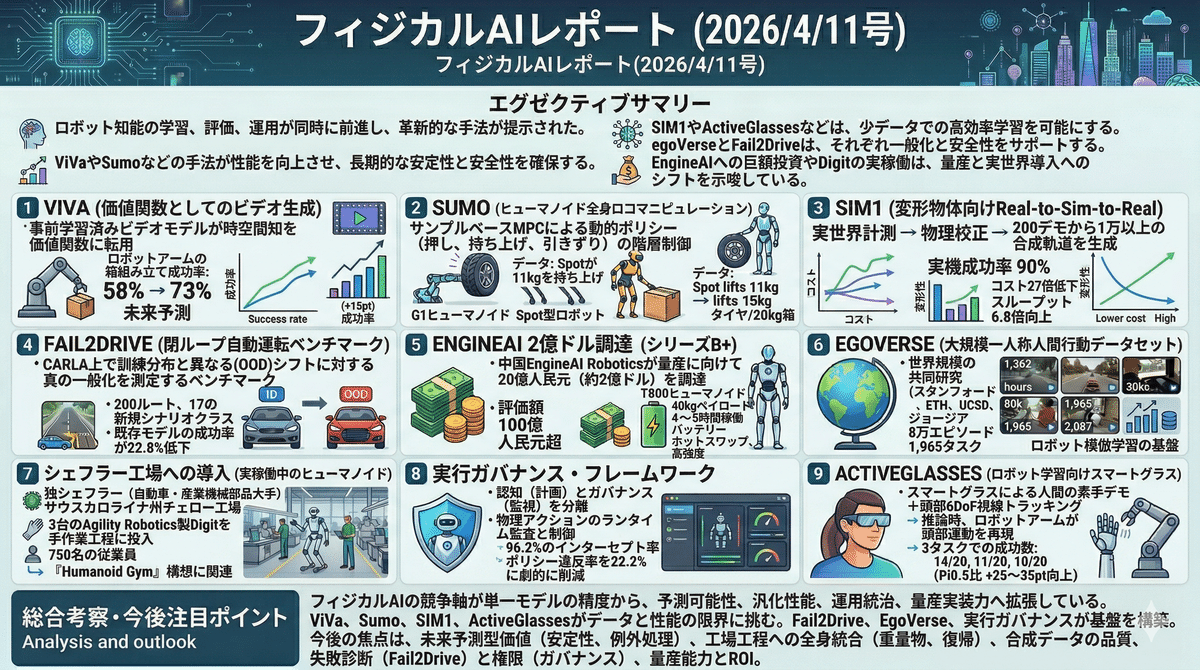
2026/4/10のフィジカルAIは、ロボット知能の「学習・評価・運用」が同時に前進したことを示している。ViVaやSumoは、長期価値推定と全身ロコマニピュレーションの性能を引き上げ、SIM1やActiveGlassesは実演データ、合成軌道、能動視線を活用した少データ高効率学習を提示した。EgoVerse、Fail2Drive、実行ガバナンスは、一般化、安全性、監査可能性を支える基盤として重要である。さらにEngineAIの大型調達やSchaeffler工場でのDigit実稼働は、フィジカルAIが研究段階から量産と現場導入の局面へ移りつつあることを強く示唆している。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ ViVa:ビデオ生成モデルを価値関数に転用するロボットRL新手法
📎 出典:arXiv:2604.08168
VLA(Vision-Language-Action)モデルの実世界展開を妨げる価値推定の問題を解決するため、事前学習済みビデオ生成モデルの時空間的事前知識を価値関数として転用する新手法「ViVa」を提案。現在の観測とロボット固有感覚を入力とし、将来の身体動態と価値スカラーを同時予測することで、静的フレームを超えた先見的な価値推定を実現する。RECAPパイプラインに統合した実機「箱の組み立て」タスクでは成功率58%→73%(+15pt)に向上し、スループット毎時14回を達成。未見物体への汎化能力も実証されており、長期タスクでの強化学習の信頼性を根本から引き上げる。
2️⃣ Sumo:動的・汎化可能なヒューマノイド全身ロコマニピュレーション
📎 出典:arXiv:2604.08508 / プロジェクトサイト
事前学習した全身制御ポリシーをサンプルベースMPCで「操舵」し、四脚・ヒューマノイド双方のロコマニ(押す・起こす・引きずる)を成立させる階層制御フレームワーク(GPT・Perplexity 2ソース一致)。Spotのピークリフト11kgに対し15kgタイヤ・20kg箱など実機重量物タスクを定量化。8つのSpot実機デモとヒューマノイド(G1)での複数タスクを含む。
3️⃣ SIM1:変形物体向け物理整合シミュレータでゼロショット実機学習をスケール
📎 出典:arXiv:2604.08544 / プロジェクトページ
変形物体(布など)操作において、実世界計測→物理校正→拡張軌道生成(拡散)を一体化したReal-to-Sim-to-Realパイプライン(GPT・Perplexity 2ソース一致)。200デモから1万超の合成軌道を生成し、実機ゼロショット成功率90%・一般化50%向上・コスト27倍低下・スループット6.8倍向上を達成。合成データのみで実データと同等(1:15相当)のパフォーマンスを主張。
4️⃣ Fail2Drive:閉ループ自動運転の真の一般化を測るベンチマーク
📎 出典:arXiv:2604.08535 / GitHub
CARLA上で訓練分布と異なる分布シフトに対する閉ループ運転の一般化を、ペア設計(ID/OOD対応)で定量化するベンチマークとツール群を公開(GPT・Perplexity 2ソース一致)。200ルート・17の新規シナリオクラス(外観/レイアウト/挙動/ロバスト性シフト)で既存モデルの平均成功率が22.8%低下することを報告。失敗原因を「診断可能なギャップ」に落とし込む点が特徴。
5️⃣ EngineAI 2億ドル調達:ヒューマノイド量産フェーズの到来
📎 出典:EngineAI 発表 / Tesla Optimus 報道
中国EngineAI Roboticsがシリーズブイで約300億円(2億ドル)を調達(Henan Investment Group主導、Luxshare参加)し、評価額がRMB100億超に到達。2,000台以上の調達フレームワーク契約も締結し、工業・警備・小売分野への展開を加速する。フラッグシップ機「T800」は40kgペイロード・1充電あたり4〜5時間稼働のホットスワップ対応バッテリーを搭載し、高強度環境での連続運用を想定した設計となっている。
6️⃣ EgoVerse:世界規模エゴセントリック人間行動データセット(ロボット学習向け)
📎 出典:arXiv:2604.07607
Stanford・ETH Zurich・UC San Diego・Georgia Tech・Meta Reality Labsほか39名超の国際共同研究体制で構築した、一人称視点の大規模実世界行動データセット「EgoVerse」を公開。1,362時間・8万エピソード・1,965タスク・2,087名の多国・多環境デモを統一フォーマットで収録し、ロボット模倣学習・クロスエンボディメント転移学習の基盤として設計されている。シミュレーションを介さず人間の実演データから直接ポリシー学習できる可能性を大規模検証し、人間データ量の増加に伴いポリシー性能が向上することを示した。
7️⃣ Schaeffler工場でヒューマノイドが実稼働:自動車部品製造現場への参入
📎 出典:NBC News 報道
独Schaeffler(自動車・産業機械部品大手)のサウスカロライナ州Cheraw工場で、Agility Robotics製ヒューマノイド「Digit」3台が実際の手作業工程に投入されている。現地スタッフは「人員削減ではなく配置転換」と説明しており、従業員750名の工場内で希少な現場事例となっている。同社は2026年2月に工場内25,000ワークステーション最適化を掲げる「Humanoid Gym」構想を発表しており、本報道はその計画が実装段階へ移行したことを示す現場エビデンスとなっている。
8️⃣ 実行ガバナンス・フレームワーク:エンボディドエージェントの行動監視と制御
📎 出典:arXiv:2604.07833
ロボットの「認知(計画)」と「ガバナンス(監視)」を分離し、物理世界での全行動をランタイムで検閲・制御する独立ミドルウェア層を提案。無許可行動を96.2%±2.7%の確率でインターセプトし、ポリシー違反率を22.2%±3.1%に劇的に削減。ポリシーチェック・承認・監視・ロールバック・人間オーバーライドを包括的に実現。
9️⃣ ActiveGlasses:スマートグラス実演+能動視線でゼロショットロボット操作学習
📎 出典:arXiv:2604.08534
スマートグラス搭載ステレオカメラで「素手」実演と頭部6DoF軌跡を同時収集し、推論時は6DoF視点アームで頭部運動を再現して遮蔽を含む実機タスクで成功率を向上(GPT・Perplexity 2ソース一致)。3タスクで各20試行の成功数14/20・11/20・10/20を達成。比較モデルPi0.5(7/20・6/20・4/20)と比べ+25〜35pt向上。別ロボット(UR5)でのクロスエンボディメント評価も実施。
総合考察
2026/4/10のトピックから見えた特長は、フィジカルAIの競争軸が単一モデルの精度から、「予測可能性」「汎化性能」「運用統治」「量産実装力」へ拡張している点にありました。ViVaは未来状態を織り込む価値推定、Sumoは事前学習制御の実運用化、SIM1は変形物操作のデータ不足解消、ActiveGlassesは人間視点の獲得効率化を進めた。一方でFail2Drive、EgoVerse、実行ガバナンスは、性能の見せ方ではなく、失敗の測定、学習基盤の拡張、現場での統制を重視しており、産業導入に必要な裏側の整備が急速に進んでいる。資金調達と工場実装のニュースは、技術成熟が事業化フェーズへ接続し始めた証左といえる。
今後注目ポイント
今後の焦点は、ViVaのような未来予測型価値推定が、単一タスクの成功率改善に留まらず、多段階作業や例外処理を含む現場業務でどこまで安定性を維持できるかに移る。
SumoやDigitの流れが示す本質は、ヒューマノイド単体の器用さではなく、重量物搬送や復帰動作を含む全身制御を、既存工場の工程設計へどう組み込めるかという統合力にある。
SIM1とEgoVerseの組み合わせは、実演データ不足を合成と大規模人間行動データで補完する流れを加速させる可能性があり、今後はデータ量よりデータ変換品質が差別化要因になる。
Fail2Driveと実行ガバナンスの重要性は今後さらに増す。高性能モデルほど、失敗の診断可能性と実行時の停止権限が導入判断を左右し、性能競争だけでは受注に結びつかなくなる。
EngineAIの大型調達とSchaefflerでの実運用は、フィジカルAI市場が研究成果の発表競争から、量産供給能力、保守体制、ROI提示力を競う産業フェーズへ入った兆候として注目に値する。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #G1
- #2026年
- #資金調達
- #フィジカルAI
- #ロボティクス
- #強化学習
- #ヒューマノイド
- #スマートグラス
- #AI最新情報
- #sumo
- #mpc
- #PhysicalAI
- #2026年4月
- #VIVA
- #VLA
- #合成データ
- #SPOT
- #工場自動化
- #CARLA
- #量産化
- #模倣学習
- #産業ロボット
- #recap
- #ゼロショット学習
- #価値関数
- #Digit
- #T800
- #AgilityRobotics
- #EngineAI
- #全身制御
- #動画生成モデル
- #行動監視
- #分布シフト
- #クロスエンボディメント
- #Schaeffler
- #安全制御
- #変形物体操作
- #SIM1
- #実機導入
- #ロコマニピュレーション
- #ロボット安全性
- #一般化性能
- #RealtoSimtoReal
- #閉ループ自動運転
- #Fail2Drive
- #EgoVerse
- #エゴセントリックデータ
- #実行ガバナンス
- #ランタイムガバナンス
- #ActiveGlasses
- #能動視線
- #ゼロショット操作学習
- #UR5



