Chatting about Conditional Trajectory Prediction
arXiv cs.RO / 4/21/2026
📰 NewsDeveloper Stack & InfrastructureModels & Research
Key Points
- The paper proposes CiT (Conditional Trajectory prediction using Cross time domain intention-interactive modeling) to predict surrounding agents’ trajectories in human-robot interaction settings where behaviors are mutually dependent.
- Unlike prior methods that often ignore the ego agent’s own motion and rely on mostly static interaction information, CiT jointly analyzes intentions across time domains and leverages cross-domain interaction signals.
- CiT uses information complementarity between different time domains to correct the ego-time-domain intention representation, producing more accurate conditional trajectory predictions.
- The method is designed to integrate with robotic motion planning and control, generating multiple optional trajectory predictions that account for potential ego-agent motions.
- Extensive experiments report state-of-the-art performance on benchmark tasks, outperforming existing trajectory prediction approaches.
Related Articles

Agent Package Manager (APM): A DevOps Guide to Reproducible AI Agents
Dev.to

3 Things I Learned Benchmarking Claude, GPT-4o, and Gemini on Real Dev Work
Dev.to
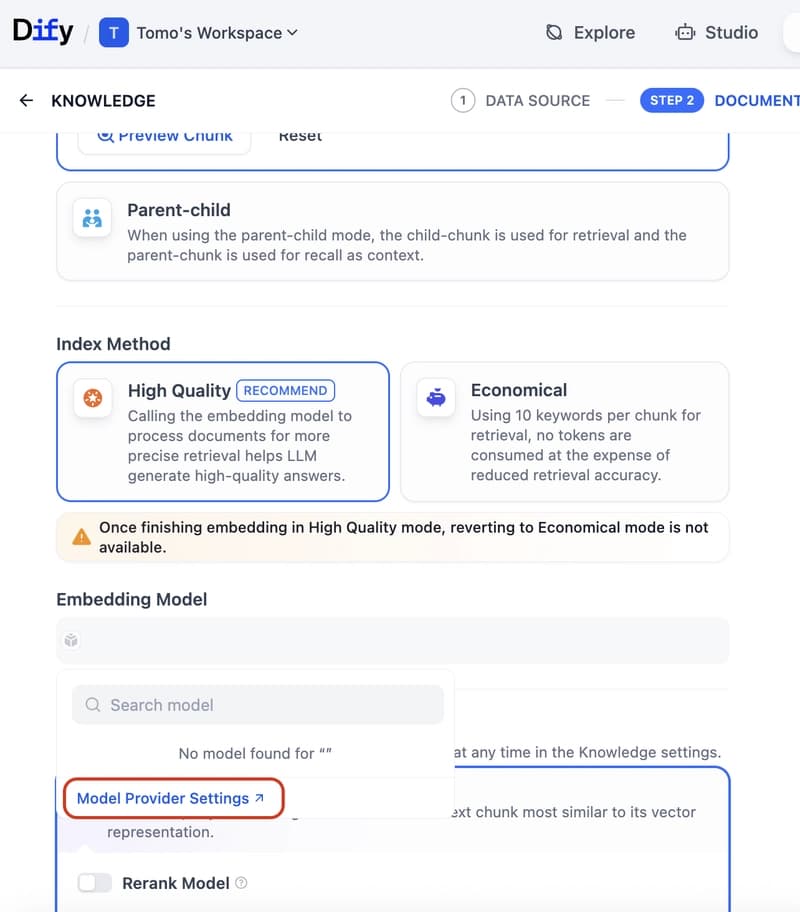
Dify Now Supports IRIS as a Vector Store — Setup Guide
Dev.to
How to build a Claude chatbot with streaming responses in under 50 lines of Node.js
Dev.to
Open Source Contributors Needed for Skillware & Rooms (AI/ML/Python)
Dev.to