Learning from the Unseen: Generative Data Augmentation for Geometric-Semantic Accident Anticipation
arXiv cs.CV / 5/4/2026
📰 NewsSignals & Early TrendsModels & Research
Key Points
- The paper targets accident anticipation in autonomous driving, highlighting that modeling road-user interactions is difficult and that large, diverse datasets are scarce.
- It introduces a dual-path framework combining prompt-guided video synthesis for generating realistic synthetic scenes with statistical distributions learned from existing data.
- It also proposes a semantic-cue-enhanced graph neural network that reasons dynamically over spatial and semantic relationships among participants.
- The authors release a new benchmark dataset with standardized, finely annotated video sequences spanning varied regions, weather, and traffic conditions.
- Experiments on existing datasets and the new benchmark show improved accuracy and earlier anticipation, suggesting the approach alleviates current data bottlenecks and improves reliability.
Related Articles
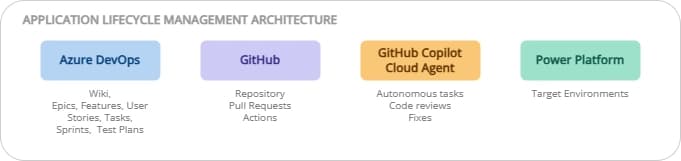
ALM on Power Platform: ADO + GitHub, the best of both worlds
Dev.to

Iron Will, Iron Problems: Kiwi-chan's Mining Misadventures! 🥝⛏️
Dev.to
Experiment: Does repeated usage influence ChatGPT 5.4 outputs in a RAG-like setup?
Dev.to
Open source models are going to be the future on Cursor, OpenCode etc.
Reddit r/LocalLLaMA
Claude Desktop + NFTs: MCP Tools for AI Agent NFT Management
Dev.to