COFFAIL: A Dataset of Successful and Anomalous Robot Skill Executions in the Context of Coffee Preparation
arXiv cs.RO / 4/21/2026
📰 NewsDeveloper Stack & InfrastructureTools & Practical UsageModels & Research
Key Points
- The paper introduces COFFAIL, a new dataset for robot manipulation research focused on coffee preparation tasks.
- COFFAIL contains both successful and anomalous robot skill execution episodes, collected using a physical robot in a kitchen environment.
- The dataset covers multiple skills and includes some examples involving bimanual (two-arm) manipulation.
- The authors demonstrate how COFFAIL can be used to train a robot policy via imitation learning, showing practical research value beyond data collection.
Related Articles

Black Hat USA
AI Business
Capsule Security Emerges From Stealth With $7 Million in Funding
Dev.to

Agent Package Manager (APM): A DevOps Guide to Reproducible AI Agents
Dev.to

3 Things I Learned Benchmarking Claude, GPT-4o, and Gemini on Real Dev Work
Dev.to
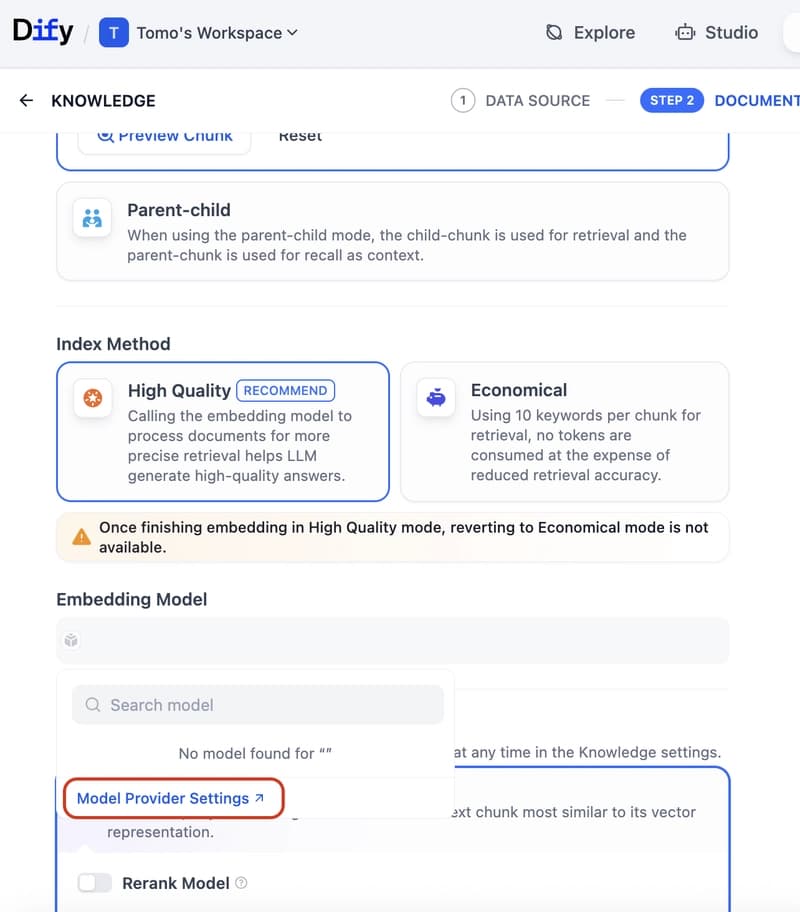
Dify Now Supports IRIS as a Vector Store — Setup Guide
Dev.to