Receding-Horizon Control via Drifting Models
arXiv cs.AI / 4/7/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper addresses trajectory optimization with unknown system dynamics where learned surrogate models cannot be used to simulate trajectories, and only an offline dataset of trajectories is available.
- It proposes “Drifting MPC,” which combines drifting generative models with receding-horizon planning to learn a conditional trajectory distribution supported by the data but biased toward low-cost (optimal) plans.
- The authors characterize the learned distribution as the unique optimizer of an objective that explicitly trades off cost optimality against closeness to the offline prior distribution.
- Empirical results indicate Drifting MPC can produce near-optimal trajectories while keeping one-step inference efficiency typical of drifting models and achieving faster generation than diffusion-based baselines.
Related Articles

Big Tech firms are accelerating AI investments and integration, while regulators and companies focus on safety and responsible adoption.
Dev.to

Could it be that this take is not too far fetched?
Reddit r/LocalLLaMA
npm audit Is Broken — Here's the Claude Code Skill I Built to Fix It
Dev.to

Meta Launches Muse Spark: A New AI Model for Everyday Use
Dev.to
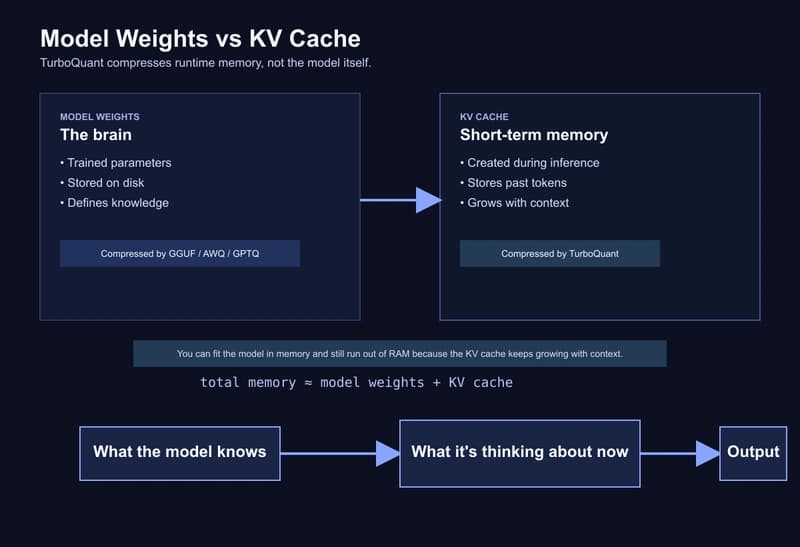
TurboQuant on a MacBook: building a one-command local stack with Ollama, MLX, and an automatic routing proxy
Dev.to