DiSCo: Diffusion Sequence Copilots for Shared Autonomy
arXiv cs.RO / 3/25/2026
💬 OpinionIdeas & Deep AnalysisModels & Research
Key Points
- The paper introduces Diffusion Sequence Copilots (DiSCo) as a shared-autonomy approach where an AI copilot corrects and completes user actions for complex control tasks like robotic arms and simulated driving.
- DiSCo uses a diffusion policy to plan action sequences that remain consistent with a user’s past actions by seeding and inpainting the diffusion process with user-provided inputs.
- The method includes tunable hyperparameters that trade off between matching expert-like actions, staying aligned with the user’s intent, and feeling responsive to the user.
- Experiments on simulated driving and robotic arm tasks show that DiSCo substantially improves task performance compared with prior shared-autonomy behavior.
- The work positions diffusion-based planning as a practical mechanism for robustness against challenging tasks, high-dimensional control demands, and potential corruption in user inputs.
Related Articles
CRM Development That Drives Growth
Dev.to
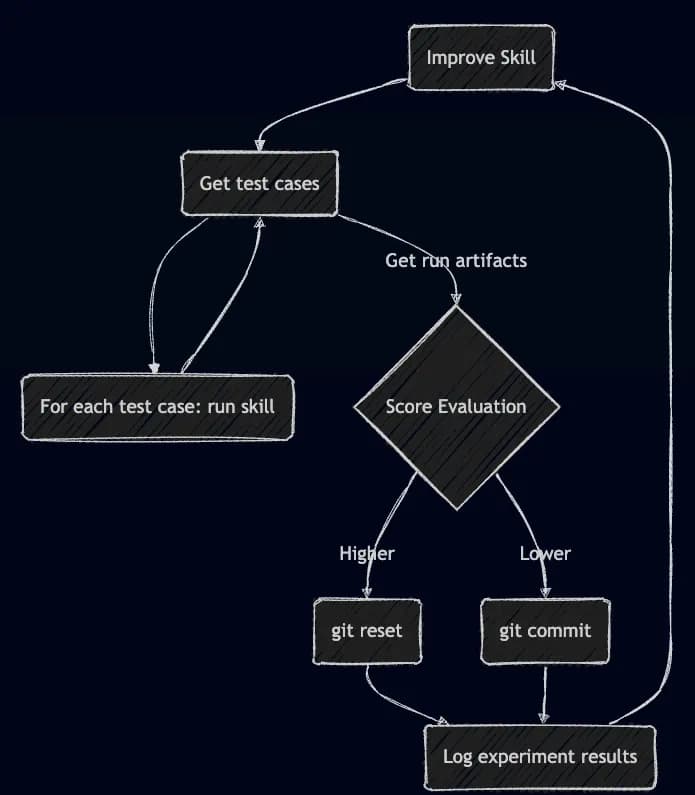
Karpathy's Autoresearch: Improving Agentic Coding Skills
Dev.to

How to Write AI Prompts That Actually Work
Dev.to
[D] Any other PhD students feel underprepared and that the bar is too low?
Reddit r/MachineLearning
Automating the Perfect Pitch: An AI Framework for Boutique PR
Dev.to