Hydra-DP3: Frequency-Aware Right-Sizing of 3D Diffusion Policies for Visuomotor Control
arXiv cs.RO / 5/5/2026
📰 NewsModels & Research
Key Points
- The paper argues that diffusion-based visuomotor policies can be designed differently from image diffusion by exploiting the frequency structure of robot action trajectories, which are dominated by a small number of low-frequency DCT modes.
- It provides a frequency-domain bound showing denoising error is mainly governed by low-frequency subspace dimension and residual high-frequency energy, implying denoising error saturates after only a few reverse steps.
- Based on this, the authors propose Hydra-DP3 (HDP3), a pocket-scale 3D diffusion policy using a lightweight Diffusion Mixer decoder that enables two-step DDIM inference.
- Experiments (synthetic and across RoboTwin2.0, Adroit, MetaWorld, plus real-world tasks) show HDP3 achieves state-of-the-art performance with <1% of the parameters of prior 3D diffusion policies and significantly lower inference latency.
- Overall, the work suggests that action denoising can use a much simpler model and fewer sampling steps than diffusion models designed for image generation.
💡 Insights using this article
This article is featured in our daily AI news digest — key takeaways and action items at a glance.
Related Articles

Singapore's Fraud Frontier: Why AI Scam Detection Demands Regulatory Precision
Dev.to
From OOM to 262K Context: Running Qwen3-Coder 30B Locally on 8GB VRAM
Dev.to
Nano Banana Pro vs DALL-E 3 vs Midjourney: A Practical Comparison From Someone Who Actually Uses All Three
Dev.to
LLMs edited 86 human essays toward a semantic cluster not occupied by any human writer [D]
Reddit r/MachineLearning
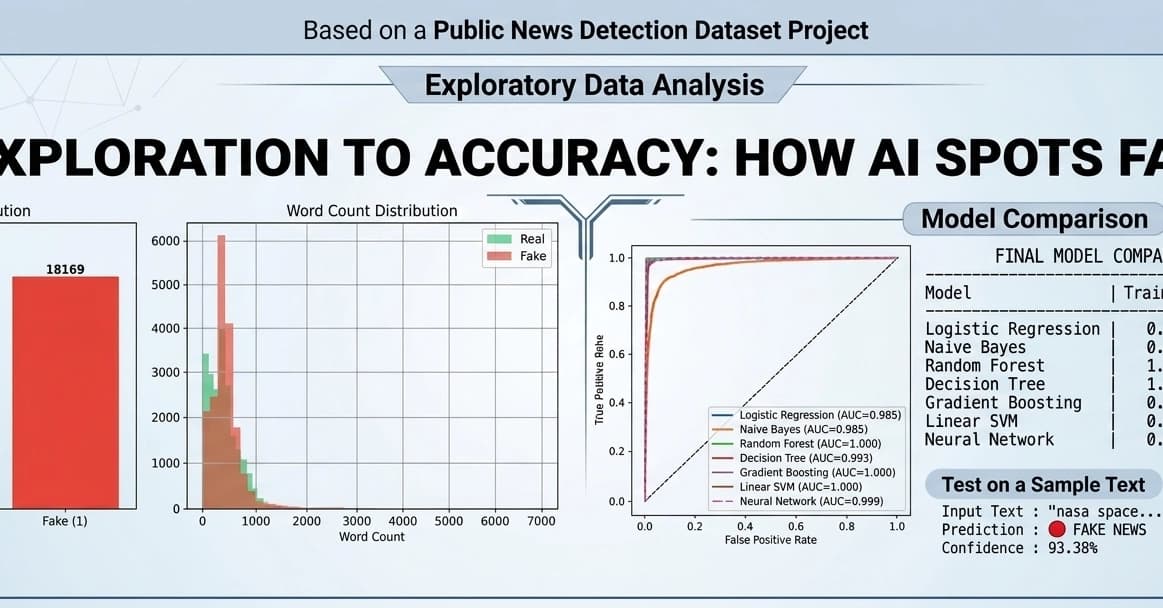
Fake News Detection using Machine Learning & NLP!
Dev.to