要旨: 大規模な環境における強化学習(RL)は、多くの場合、深刻な計算上のボトルネックに悩まされます。従来の後悔(regret)最小化アルゴリズムでは、計画および統計的推定のオラクルへの、繰り返しでコストの高い呼び出しが必要となるためです。近年、オフラインのオラクル効率的アルゴリズムが研究されてきましたが、その計算複雑性は通常、状態空間と行動空間の濃度(cardinality)に比例してスケールし、大規模または連続的な環境では実行不可能になります。本論文では、log-barrier(対数バリア)とlog-determinant(対数行列式)正則化の観点から、オフラインのオラクル効率的なエピソード型RLを調べることで、この根本的な制限に取り組みます。具体的には、表形式マルコフ決定過程(MDP)に対して、Tが既知の場合に、オフラインの統計的推定オラクルと計画オラクルの両方への呼び出しを合わせてO(H回だけで済み、さらに後悔の上界が最適な
log\log T)
tilde{O}(
sqrt{T})Tが未知の場合には呼び出し回数がO(H回になります。重要なのは、このオラクル複雑性が、状態空間と行動空間の大きさに完全に依存しない点です。この厳密な独立性により、計画オラクルの複雑性が大幅に低減され、既存のオフライン・オラクル効率的アルゴリズム(Qian et al., 2024)に比べて実質的な改善となります。さらに、本枠組みの汎用性を示すため、無限の状態空間と任意の行動空間を持つ線形MDPへアルゴリズムを一般化します。一般化したアプローチが、有意義な(sub-linear)部分線形の後悔を達成できることを証明します。結果として、本研究は、無限の状態空間と行動空間を持つMDPを解くことが可能な、最初の「二重オラクル効率的(すなわち、統計的推定と方策最適化の両方に対して効率的)」な後悔最小化アルゴリズムを提供し、計算上の実行可能性の限界を大きく押し広げます。
log T)
ダブル・オラクル効率を用いた政策最適化とオフライン推定のためのモデルベース強化学習
arXiv cs.LG / 2026/5/4
📰 ニュースModels & Research
要点
- 本論文は、強化学習における主要な計算ボトルネックを、統計的推定と計画の「オラクル」に対する呼び出し回数を抑えることで解決することを目指している。
- 表形式のエピソード的MDPに対して、最適な o(sqrt(T)) の後悔(regret)上界を達成しつつ、Tが既知の場合は O(H log log T) 回、Tが未知の場合は O(H log T) 回のオラクル呼び出しで済むアルゴリズムを提案する。
- 重要な点として、必要なオラクル計算量が状態空間・行動空間のサイズに依存しないため、既存のオフライン・オラクル効率化手法と比べて計画オラクルの複雑さを大幅に低減できる。
- さらに、この枠組みを線形MDPへ拡張し、状態空間が無限で行動空間が任意の場合でも、意味のある劣線形(sub-linear)後悔を保証して大規模/連続設定での計算可能範囲を広げることを示す。
関連記事
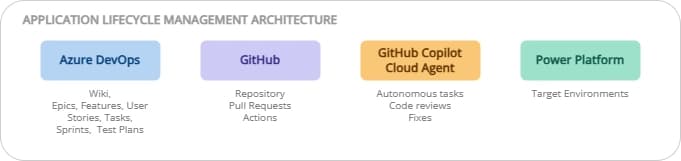
Power PlatformにおけるALM:ADO+GitHubで「両方の良いところ」を取る
Dev.to
実験:RAGライク構成でChatGPT 5.4の出力は反復利用で変わるのか?
Dev.to
「覚えたルール」がバグにも都合よく当てはまるとき——エージェントワークフローのメタトラップ
Dev.to
LWiAIポッドキャスト #243 - GPT 5.5、DeepSeek V4、AI安全の妨害
Last Week in AI

マルチモーダルAI「Flamingo」を読むための前提知識まとめ②(Catastrophic Forgetting、Frozen backbone、セルフアテンションとクロスアテンション、自己回帰モデル)
Qiita