フィジカルAIニュース(2026/4/30号)

更新日:2026/4/30
エグゼクティブサマリー
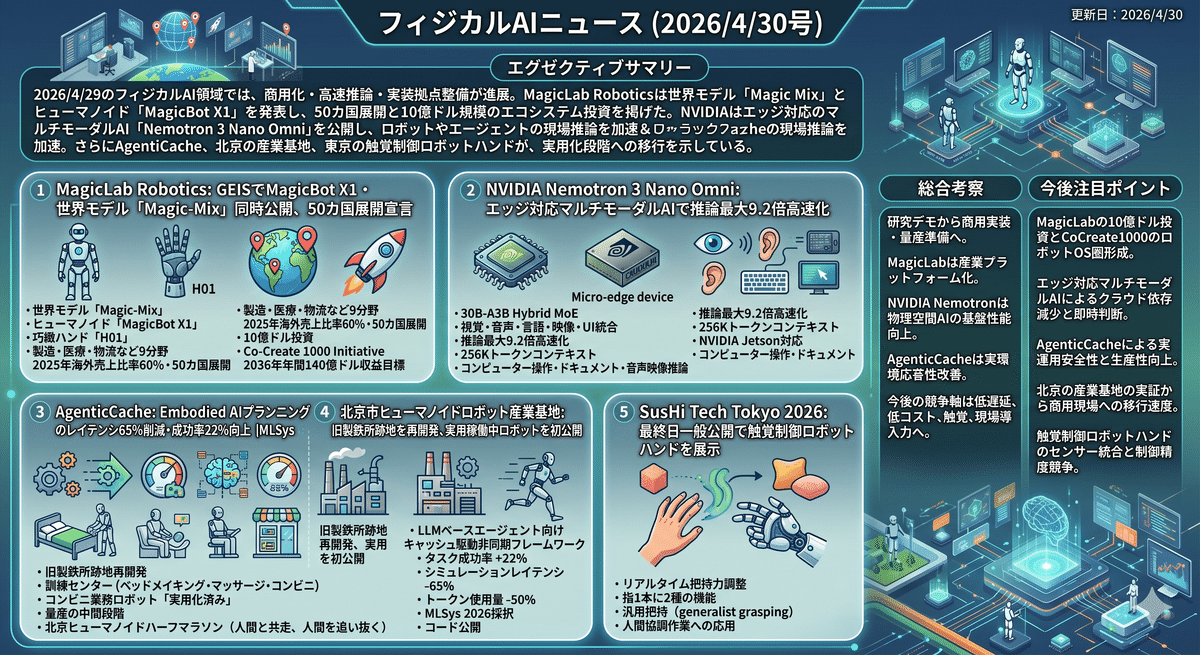
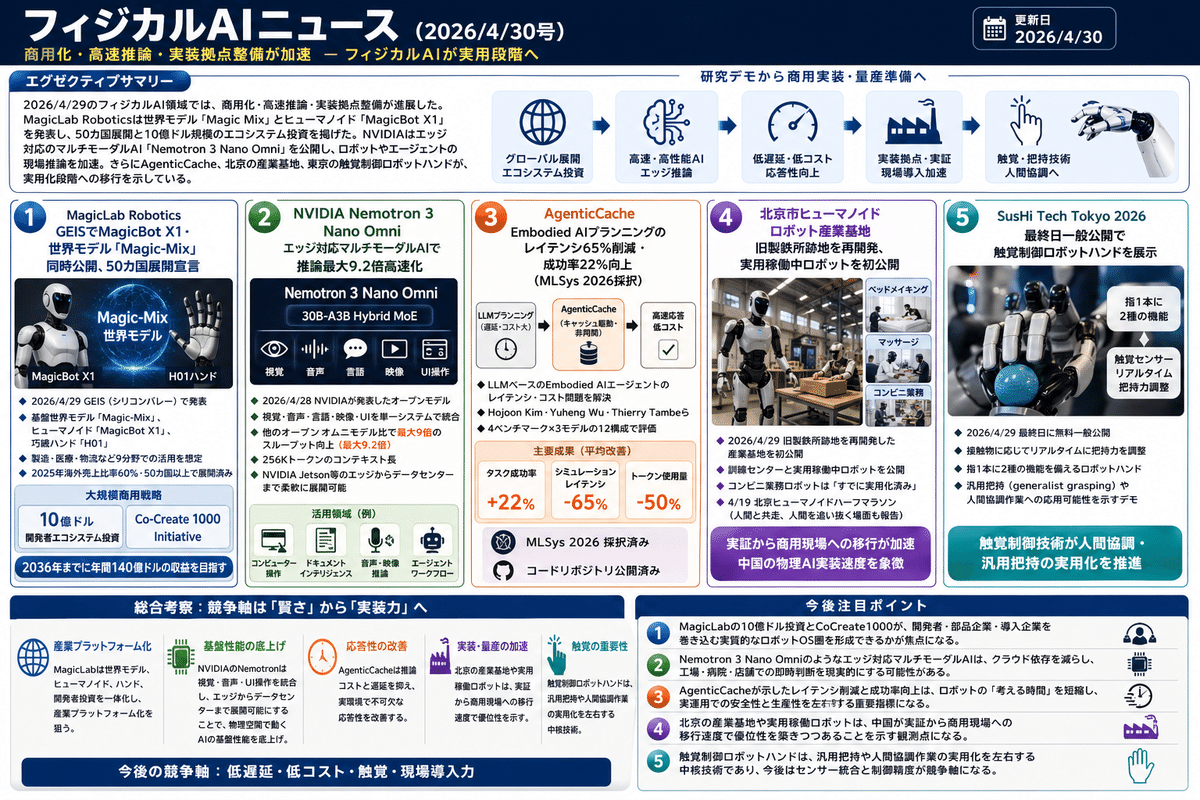
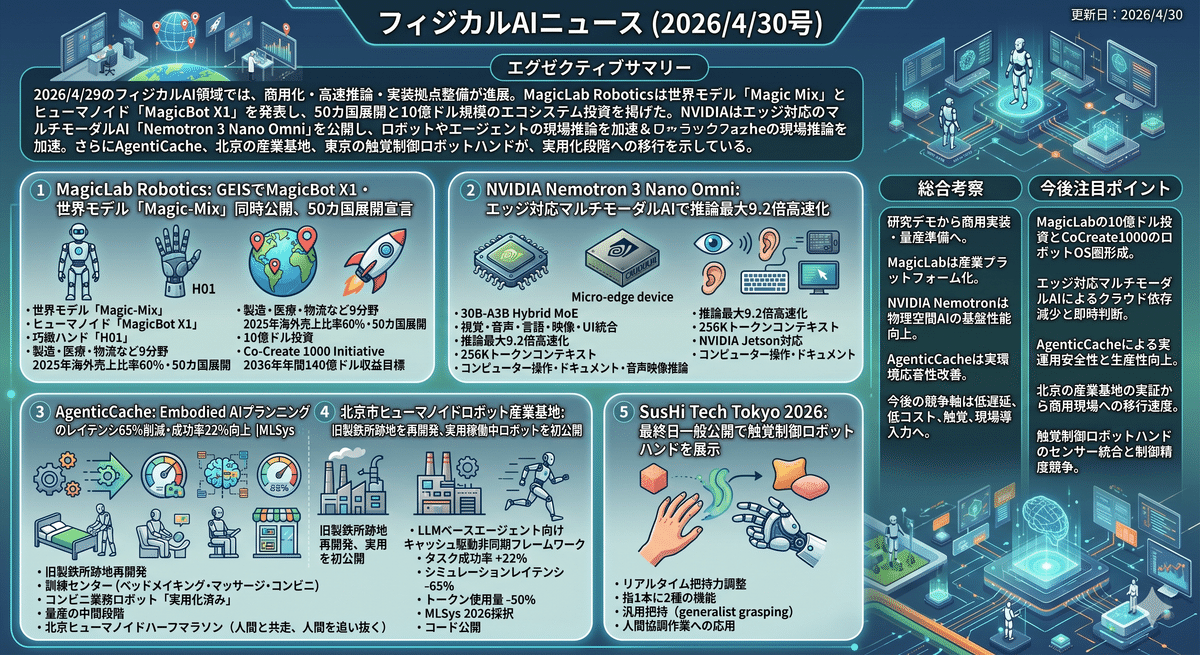
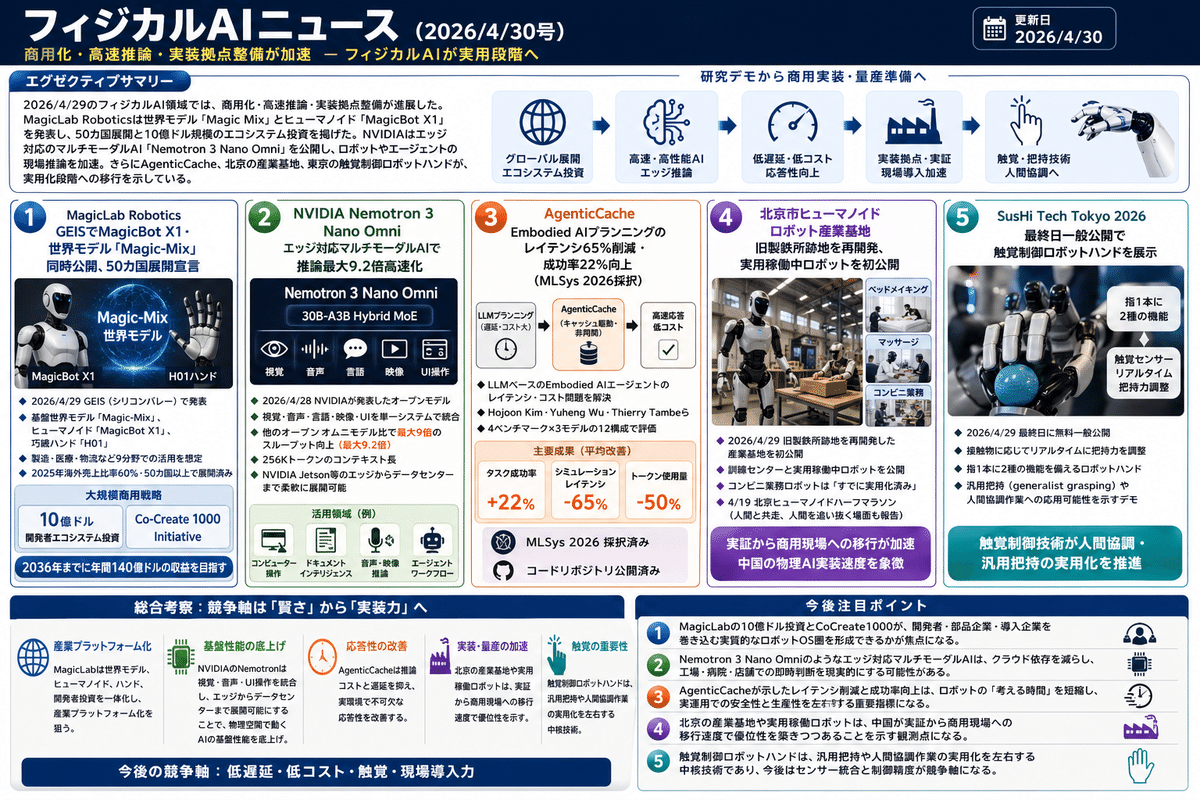
2026/4/29のフィジカルAI領域では、商用化・高速推論・実装拠点整備が進展した。MagicLab Roboticsは世界モデル「Magic Mix」とヒューマノイド「MagicBot X1」を発表し、50カ国展開と10億ドル規模のエコシステム投資を掲げた。NVIDIAはエッジ対応のマルチモーダルAI「Nemotron 3 Nano Omni」を公開し、ロボットやエージェントの現場推論を加速。さらにAgenticCache、北京の産業基地、東京の触覚制御ロボットハンドが、実用化段階への移行を示している。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ MagicLab Robotics — GEISでMagicBot X1・世界モデル「Magic-Mix」同時公開、50カ国展開宣言
https://www.morningstar.com/news/pr-newswire/20260429cn46475/magiclab-robotics-unveils-its-embodied-ai-vision-in-silicon-valley-expands-global-reach-to-50-countries
2026年4月29日、シリコンバレーで開催された「Global Embodied Intelligence Summit(GEIS)」にてMagicLab Roboticsが基盤世界モデル「Magic-Mix」、ヒューマノイドロボット「MagicBot X1」、巧緻ハンド「H01」を発表。製造・医療・物流など9分野での活用を想定し、2025年の海外売上比率は60%・50カ国以上で事業展開済み。開発者エコシステムへの10億ドル投資と「Co-Create 1000 Initiative」を通じ、2036年までに年間140億ドルの収益を目指す大規模商用戦略を公表した。
2️⃣ NVIDIA Nemotron 3 Nano Omni — エッジ対応マルチモーダルAIで推論最大9.2倍高速化
https://blogs.nvidia.com/blog/nemotron-3-nano-omni-multimodal-ai-agents/
2026年4月28日、NVIDIAが発表した30B-A3B Hybrid MoEアーキテクチャのオープンマルチモーダルモデル「Nemotron 3 Nano Omni」。視覚・音声・言語・映像・UIを単一システムで統合し、他のオープンオムニモデル比で最大9倍のスループット向上を実現。256Kトークンのコンテキスト長を持ち、NVIDIA Jetsonなどエッジデバイスからデータセンターまで柔軟に展開可能。コンピューター操作・ドキュメントインテリジェンス・音声映像推論など幅広いエージェントワークフローへの活用が期待される。
3️⃣ AgenticCache — Embodied AIプランニングのレイテンシ65%削減・成功率22%向上(MLSys 2026採択)
https://arxiv.org/abs/2604.24039
LLMベースのEmbodied AIエージェントが抱えるプランニング呼び出しのレイテンシ・コスト問題を、キャッシュ駆動の非同期フレームワーク「AgenticCache」で解決。Hojoon Kim・Yuheng Wu・Thierry Tambeらによる本研究は4ベンチマーク×3モデルの12構成でタスク成功率+22%・シミュレーションレイテンシ-65%・トークン使用量-50%を達成。MLSys 2026に採択済みで、コードリポジトリも公開されており産業応用への実践的な道筋を示している。
4️⃣ 北京市ヒューマノイドロボット産業基地 — 旧製鉄所跡地を再開発、実用稼働中ロボットを初公開
https://www.youtube.com/watch?v=EZZKYLvgr0k
2026年4月29日、北京市が旧製鉄所跡地を再開発したヒューマノイドロボット産業基地を初公開。ベッドメイキング・マッサージ・コンビニ業務等の訓練センターと実用稼働中ロボットを公開。コンビニ業務ロボットは「すでに実用化済み」と報告されており、単なるデモ施設を超えた実証・量産の中間段階にある。4月19日の北京ヒューマノイドハーフマラソン(人間と共走、人間を追い抜く場面も報告)とともに、中国の物理AI実装速度の加速を示す重要な指標となっている。
5️⃣ SusHi Tech Tokyo 2026 — 最終日一般公開で触覚制御ロボットハンドを展示
https://www.youtube.com/watch?v=Ss5aSRaNxG0
2026年4月29日、東京都主催「SusHi Tech Tokyo 2026」が最終日に無料一般公開され、接触物に応じてリアルタイムに把持力を調整する触覚制御ロボットハンドが展示された。指1本に2種の機能を備えるロボットハンドとして紹介され、汎用把持(generalist grasping)や人間協調作業への応用可能性を示すデモとして注目された。
総合考察
2026/4/29のトピックは、フィジカルAIが研究デモから商用実装・量産準備へ進み始めたことを示していました。MagicLabは世界モデル、ヒューマノイド、ハンド、開発者投資を一体化し、単体製品ではなく産業プラットフォーム化を狙う姿勢が鮮明だ。NVIDIAのNemotronは、視覚・音声・UI操作を統合し、エッジからデータセンターまで展開可能にすることで、物理空間で動くAIの基盤性能を底上げする。一方、AgenticCacheは推論コストと遅延を抑え、実環境で不可欠な応答性を改善する。北京や東京の事例も含め、今後の競争軸は「賢さ」だけでなく、低遅延、低コスト、触覚、現場導入力へ移っていく。
今後注目ポイント
MagicLabの10億ドル投資とCoCreate1000が、開発者・部品企業・導入企業を巻き込む実質的なロボットOS圏を形成できるかが焦点になる。
Nemotron 3 Nano Omniのようなエッジ対応マルチモーダルAIは、クラウド依存を減らし、工場・病院・店舗での即時判断を現実的にする可能性がある。
AgenticCacheが示したレイテンシ削減と成功率向上は、ロボットの「考える時間」を短縮し、実運用での安全性と生産性を左右する重要指標になる。
北京の産業基地や実用稼働ロボットは、中国が実証から商用現場への移行速度で優位性を築きつつあることを示す観測点になる。
触覚制御ロボットハンドは、汎用把持や人間協調作業の実用化を左右する中核技術であり、今後はセンサー統合と制御精度が競争軸になる。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #2026年
- #AIエージェント
- #nvidia
- #フィジカルAI
- #製造業DX
- #エッジAI
- #AI最新情報
- #2026年4月
- #マルチモーダルAI
- #PhysicalAI
- #ヒューマノイドロボット
- #世界モデル
- #物理AI
- #embodiedaI
- #ロボットハンド
- #医療ロボット
- #LLMエージェント
- #物流ロボット
- #トークン削減
- #低レイテンシ
- #推論高速化
- #ロボット量産
- #SusHiTechTokyo2026
- #北京ハーフマラソン
- #ロボット実装
- #NVIDIAJetson
- #H01
- #GEIS
- #実用ロボット
- #人間協調作業
- #汎用把持
- #触覚制御
- #ヒューマノイド産業
- #北京ロボット産業基地
- #MLSys2026
- #ロボットプランニング
- #AgenticCache
- #HybridMoE
- #Nemotron3NanoOmni
- #CoCreate1000
- #巧緻ハンド
- #MagicMix
- #MagicBotX1
- #MagicLabRobotics




