この記事の3つのポイント
- フィジカルAIでは、「人が多い領域」の自動化実現を目指す
- 人型ロボット活用に意欲、顧客へのポートフォリオを拡大する
- 「0.1mmの精度」が必要か、タスクごとの「見極め」こそ重要に
安川電機が、フィジカルAIを軸に事業を急拡大させようとしている。2025年には人型ロボットの新興企業を買収し、米国の新拠点に1億8000万米ドルの投資も発表した。フィジカルAIをどう活用するのか、人型ロボットへの業容拡大や米国に力を入れる狙いは何か。技術開発本部AIロボティクス統括部長の久保田由美恵氏に聞いた。
フィジカルAIの開発で、何を重要と考えるか。
我々が考えるフィジカルAIで、最も重要視していることは、「現場で計画通りに動けるかどうか」だ。安川電機の源流は、モーターやアクチュエーターと、それらを制御するモーションコントロールにある。ロボットの精度は、これらに左右されるため、持ち味を発揮できる。
米国や中国の人型ロボットの技術は、確かに目を見張るものがある。跳ねたり踊ったりするだけでなく、実際に工場を想定した作業も実演し始めた。ただ、求められる自動化の精度は、領域ごとに異なる。
例えば洗濯物を畳む作業や、部品に緩衝材を巻いて梱包する作業なら、5mmのずれの影響は小さい。一方、ものづくり現場のねじ締めで5mmずれたら、もはや作業にならない。必要な精度や速度はタスクごとに異なる。
日本は、ものづくりに関する質の良いデータを収集しやすい環境だ。現場が求める精度や速度を1つずつ達成してきた知見と、ロボットを半世紀近く造り続けた経験は、フィジカルAIの開発で強みになるだろう。
2023年に、フィジカルAIを採用した旗艦モデルといえる自律ロボット「MOTOMAN NEXT」(モートマンネクスト)を発売した。従来の産業用ロボットとラインアップを分けた意図はどこにあるのか。
すべてフィジカルAIで制御する必要性はない。AIを使った制御は「その場で考え、計画し、動く」という処理を要する。自律的な判断を都度行うぶん、事前に動作をプログラムして繰り返す制御に比べて、速度や精度は落ちる。既にプログラムできた作業をわざわざAIに置き換えるのは、デメリットしかない。
フィジカルAIで制御する領域と、従来のルールベースで制御する領域は、切り分けて考える必要がある。GPU(画像処理半導体)の進化に伴い急速に実用性が高まったAI技術を、従来の「同じ作業を高速に繰り返すロボット」に適用したら、タスクに対して性能過剰になるだろう。それなら、自律性を求める領域に特化した、新しい製品を開発した方が得策だ。フィジカルAIの領域は、MOTOMAN NEXTが担っていく。
2026年にはMOTOMAN NEXTの双腕ロボットが、長い物品を段ボールに梱包する様子の動画を公開するなど、作業領域が拡大している。
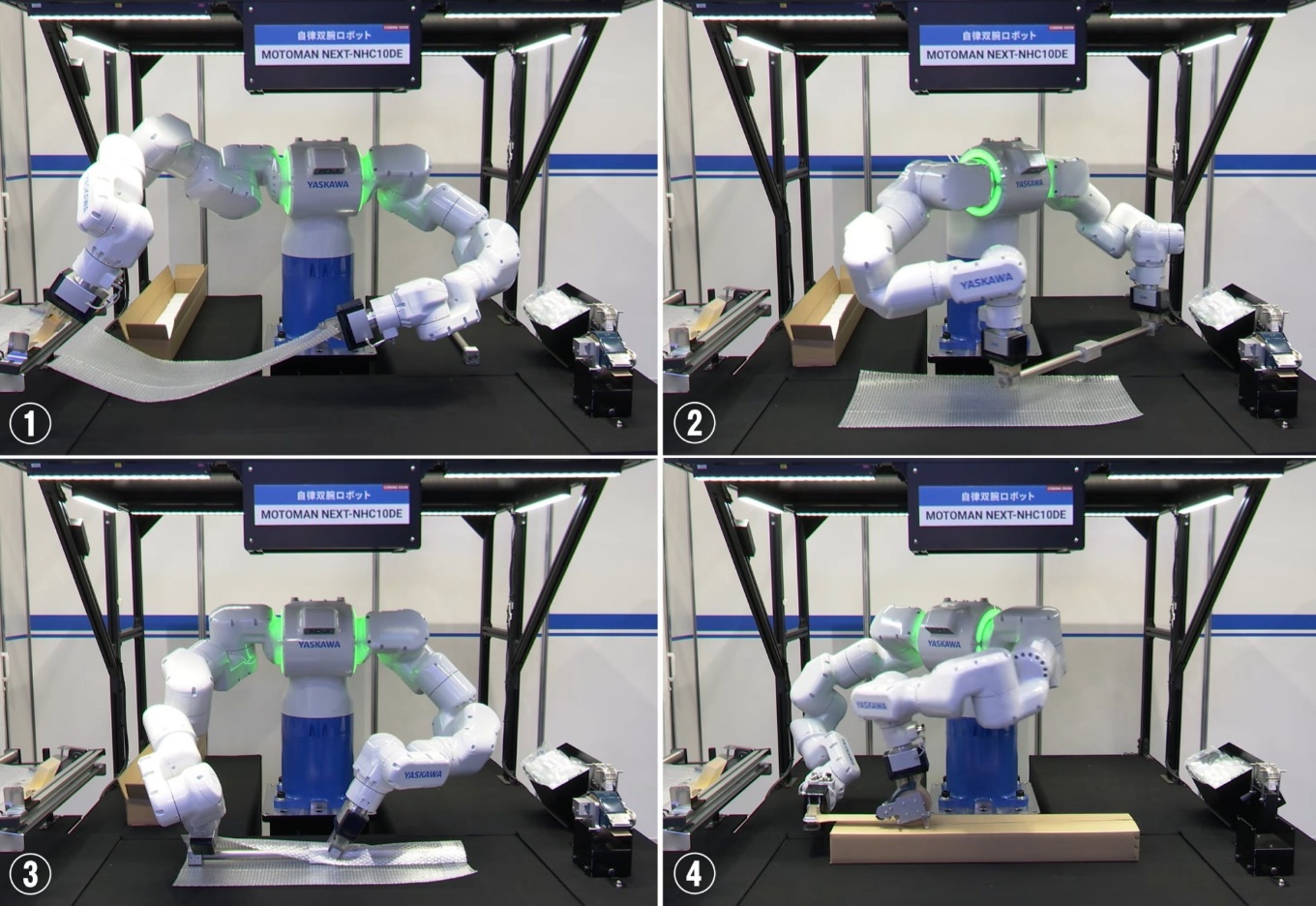
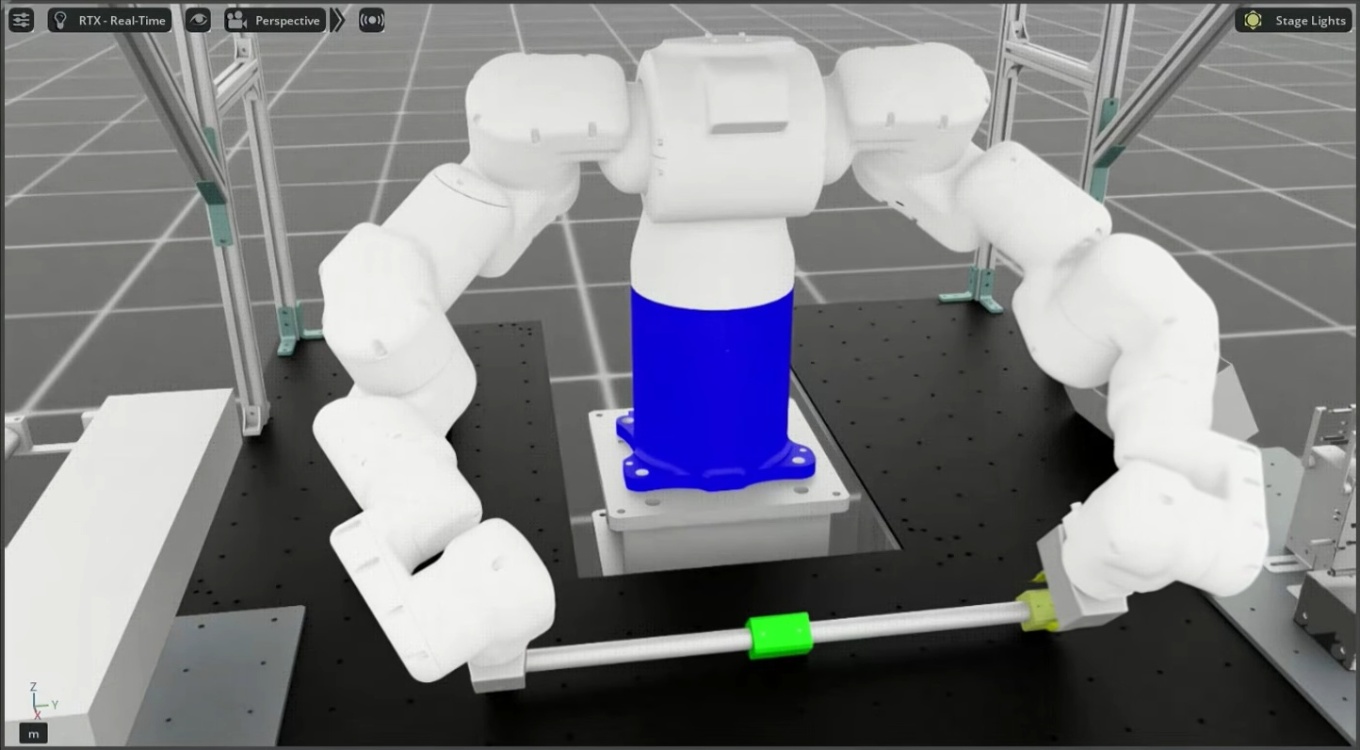
電子商取引(EC)事業者の倉庫など、形の異なる物品に柔らかい緩衝材を巻いて段ボールに梱包する作業は、まだ人手が残る領域だ。動作の模倣学習など、ロボット基盤モデルには米NVIDIA(エヌビディア)の「Isaac GR00T」、シミュレーション上での強化学習には、エヌビディアの「Isaac Sim」を活用して実現した。
MOTOMAN NEXTのロボットコントローラーには、エヌビディアのGPUを標準搭載する。そもそも、製造業向けAIを強化しようと子会社のエイアイキューブ(東京・中央)を2018年に立ち上げた当初から、同社のGPUを使っていた。協業が本格化したことで、コントローラーにGPUを搭載する際の細かい調整や、Isaac SimのライブラリーにMOTOMAN NEXTの全機種を対応させる開発環境の構築など、ハードとソフトの両面で連携を深めている。
フィジカルAIによる新たな自動化領域として、どこを狙っているか。
次のページ
PC不要、GPU内蔵コントローラーの理由この記事は有料会員限定です




