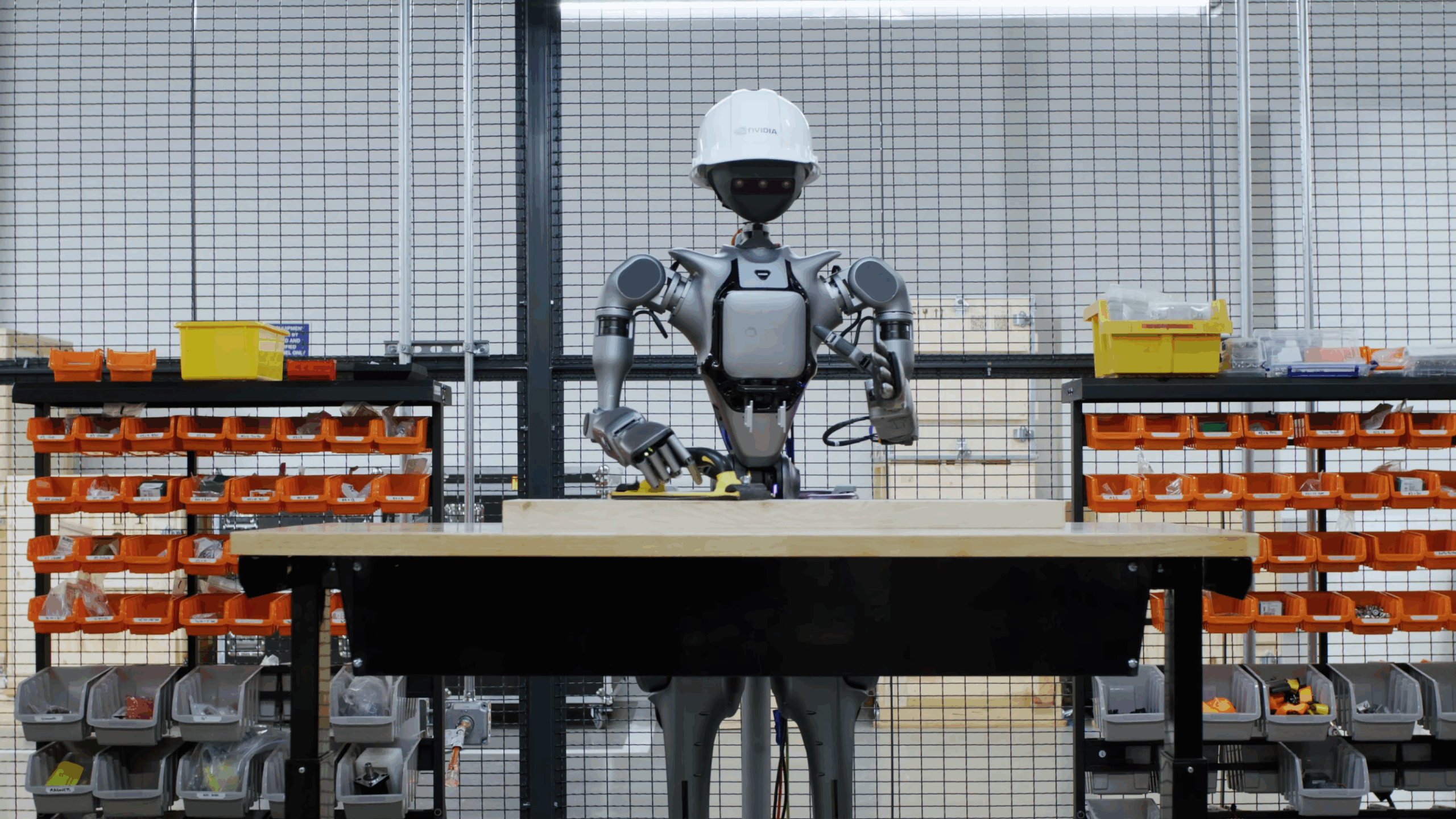
Nvidia、UC Berkeley、Stanfordによる新しいフレームワークが、AIモデルがコードによってロボットをどれだけうまく制御できるかを体系的に検証します。その結果は次のとおりです。人間が設計した抽象化(アブストラクション)がない場合、たとえ最先端のモデルでも失敗しますが、特定のテスト時計算量スケーリングのような手法によってその差は埋められます。
この記事 AI models fail at robot control without human-designed building blocks but agentic scaffolding closes the gap は、The Decoder に最初に掲載されました。