フィジカルAIニュース(2026/5/5号)

更新日:2026/5/5
エグゼクティブサマリー
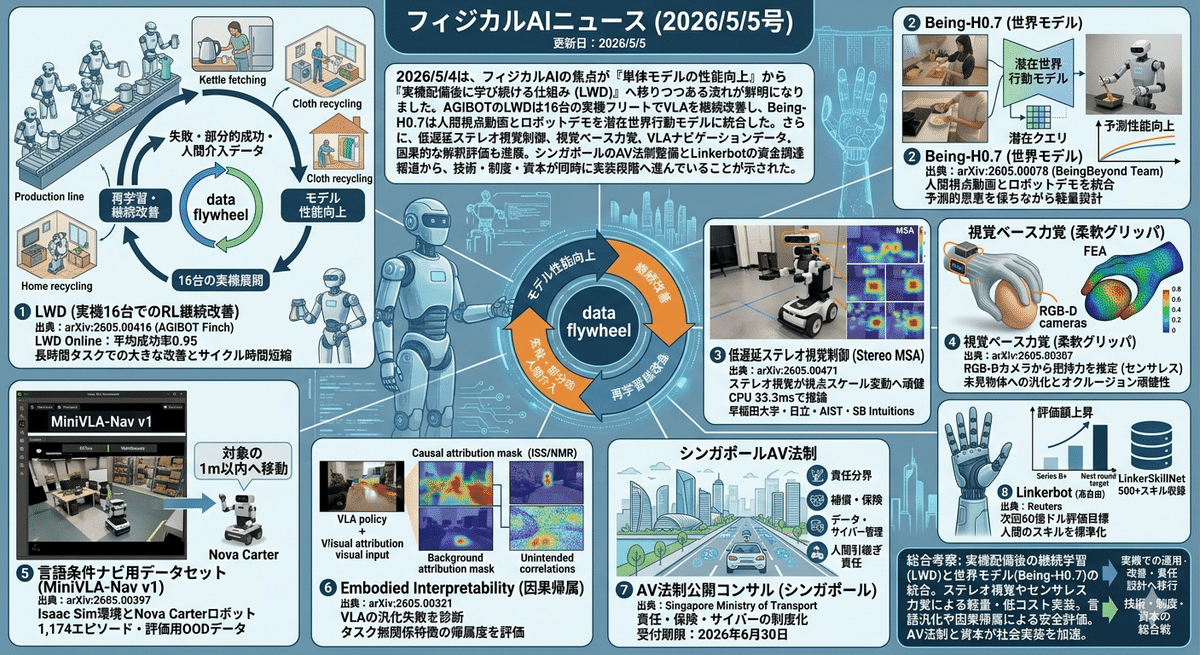
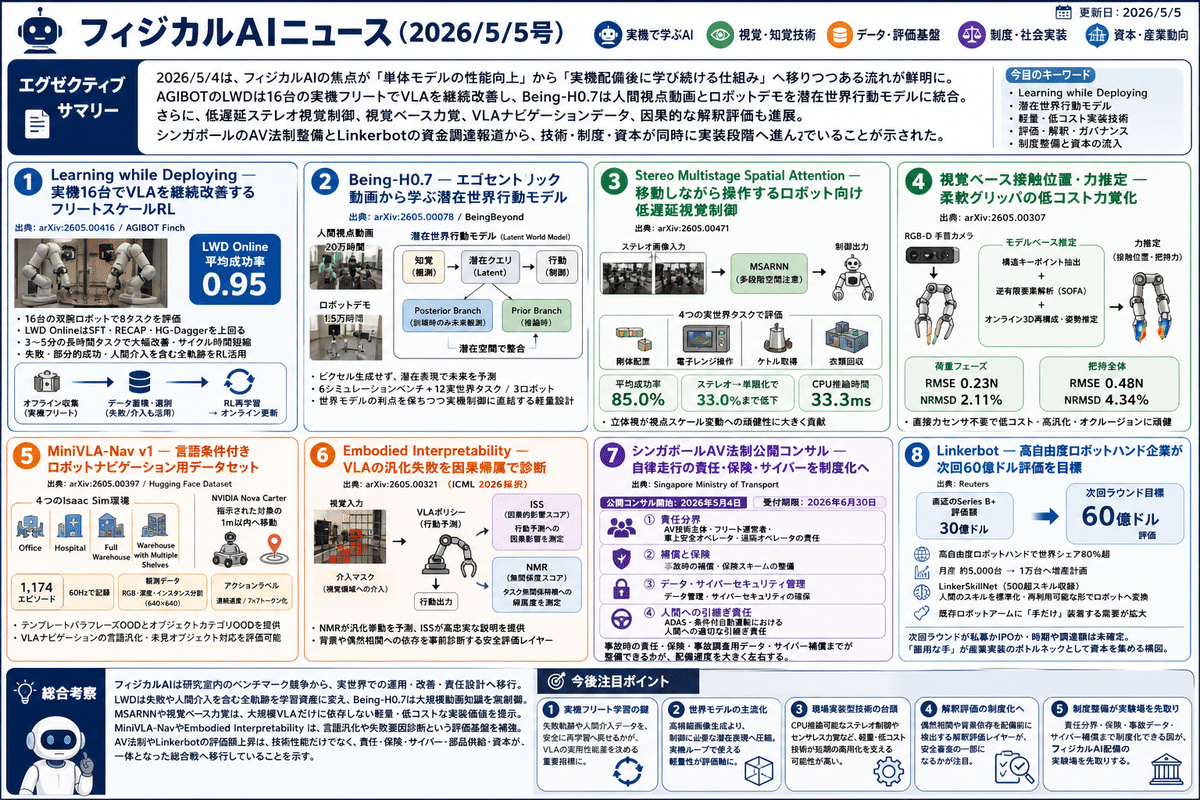
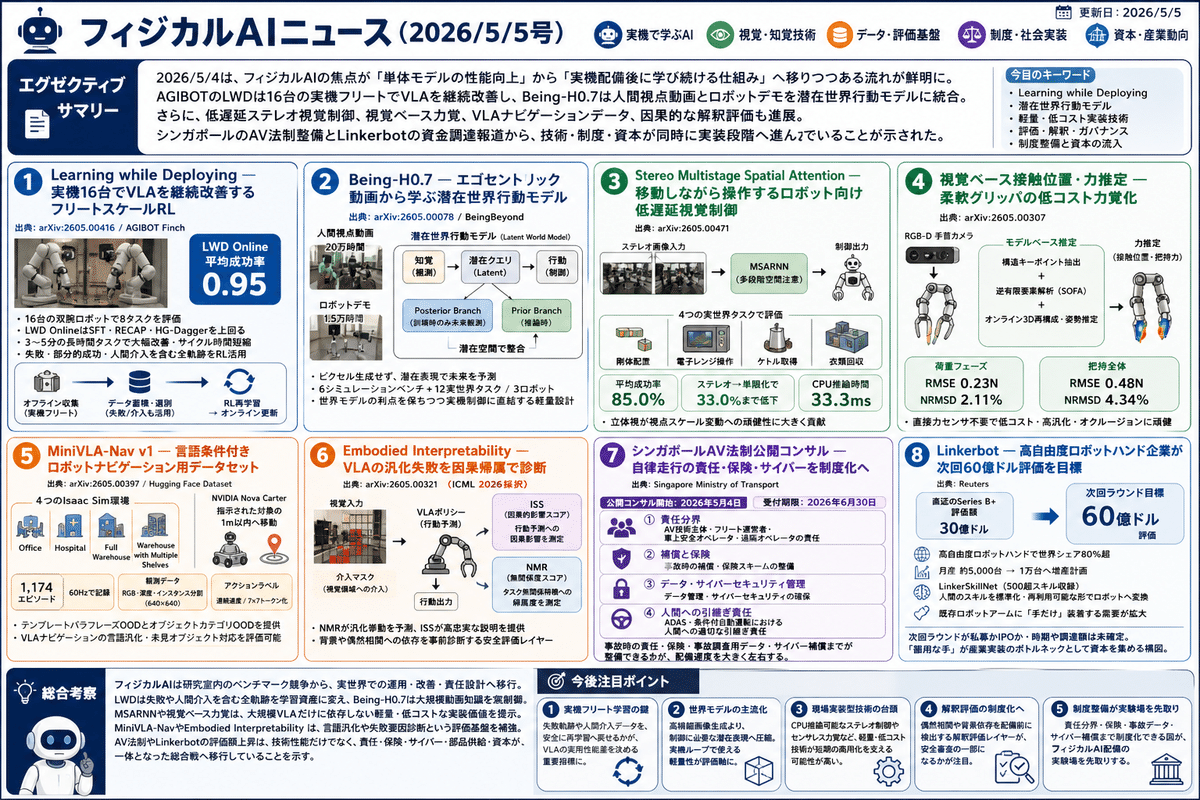
2026/5/4は、フィジカルAIの焦点が「単体モデルの性能向上」から「実機配備後に学び続ける仕組み」へ移りつつある流れが鮮明になりました。AGIBOTのLWDは16台の実機フリートでVLAを継続改善し、BeingH07は人間視点動画とロボットデモを潜在世界行動モデルに統合した。さらに、低遅延ステレオ視覚制御、視覚ベース力覚、VLAナビゲーションデータ、因果的な解釈評価も進展。シンガポールのAV法制整備とLinkerbotの資金調達報道から、技術・制度・資本が同時に実装段階へ進んでいることが示された。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ Learning while Deploying — 実機16台でVLAを継続改善するフリートスケールRL
📎 出典:arXiv:2605.00416 / AGIBOT Finch / 論文PDF (arXiv)
AGIBOT Finchが、実機展開中のロボットを継続学習データ源に変えるフレームワーク「Learning while Deploying(LWD)」を発表。16台の双腕ロボットで8つの実世界操作タスクを評価し、LWD Onlineは平均成功率0.95を達成。SFT・RECAP・HG-DAggerを上回り、3〜5分の長時間タスクで特に大きな改善とサイクル時間の短縮を実現。失敗・部分的成功・人間介入を含む全軌跡をRLで活用するオフライン→オンラインのデータフライホイール型後学習を示した研究。
2️⃣ Being-H0.7 — エゴセントリック動画から学ぶ潜在世界行動モデル
📎 出典:arXiv:2605.00078 / BeingBeyond (arXiv)
BeingBeyond Teamが、エゴセントリック動画から未来認識型ロボット制御を学ぶ潜在世界行動モデル「Being-H0.7」を発表。ピクセル空間で未来フレームを生成せず、知覚と行動の間に学習可能な潜在クエリを挿入し、訓練時のみ未来観測を用いるposterior branchと推論時のprior branchを潜在空間で整合させる。20万時間の人間視点動画と1.5万時間のロボットデモで学習し、6つのシミュレーションベンチマークおよび12実世界タスク・3ロボットプラットフォームで評価。世界モデルの予測的恩恵を保ちながら、実機制御ループへ直接展開できる軽量設計が特徴だ。
3️⃣ Stereo Multistage Spatial Attention — 移動しながら操作するロボット向け低遅延視覚制御
📎 出典:arXiv:2605.00471 / arXiv HTML (arXiv)
早稲田大学・日立・AIST・SB Intuitionsの研究チームが、移動マニピュレータ向けにステレオ画像と多段階空間注意(MSA)を組み合わせる手法MSARNNを発表。剛体配置・電子レンジ操作・ケトル取得・衣類回収の4実世界タスクで評価し、提案手法は平均成功率85.0%を達成。ステレオを単眼化すると33.0%まで低下し、立体視が視点スケール変動への頑健性に寄与することを示した。推論はCPU上で33.3msと報告され、VLA大規模モデルだけでなく軽量な閉ループ実装の有効性を示す研究となった。
4️⃣ 視覚ベース接触位置・力推定 — 柔軟グリッパの低コスト力覚化
📎 出典:arXiv:2605.00307 / arXiv HTML (arXiv)
研究チームが、柔軟なfin-ray型グリッパの接触位置と把持力をRGB-D手首カメラから推定するモデルベース手法を発表。構造キーポイントを抽出し、SOFA上の逆有限要素解析とオンライン3D再構成・姿勢推定を組み合わせることで、直接力センサを追加せずに把持力を推定する。荷重フェーズではRMSE 0.23N・NRMSD 2.11%、把持全体ではRMSE 0.48N・NRMSD 4.34%を報告。未見物体への汎化や視覚的オクルージョンへの頑健性も示し、壊れやすい対象を扱うロボットへの視覚ベース力覚の実装価値を示した。
5️⃣ MiniVLA-Nav v1 — 言語条件付きロボットナビゲーション用シミュレーションデータセット
📎 出典:arXiv:2605.00397 / Hugging Face Dataset (arXiv)
Ali Al-Bustami氏とJaerock Kwon氏が、言語条件付き対象接近タスク向けデータセット「MiniVLA-Nav v1」を発表。Office・Hospital・Full Warehouse・Warehouse with Multiple Shelvesの4Isaac Sim環境で、NVIDIA Nova Carterが指示された対象の1m以内へ移動する設定を採用。1,174エピソードに640×640 RGB・深度・インスタンス分割・連続速度ラベル・7×7トークン化アクションを60Hzで記録する。テンプレートパラフレーズOODとオブジェクトカテゴリOODの評価分割を備え、VLAナビゲーションの言語汎化・未見オブジェクト対応を切り分ける評価資産として有用だ。
6️⃣ Embodied Interpretability — VLAの汎化失敗を因果帰属で診断
📎 出典:arXiv:2605.00321 (arXiv)
Hanxin Zhang氏らが、VLAポリシーの視覚から行動への帰属を因果的に評価する「Embodied Interpretability」を発表し、ICML 2026採択が明記された。提案は、視覚領域への介入マスクで行動予測への因果影響を測るISSと、タスク無関係特徴への帰属度を表すNMRを導入するもの。多様なマニピュレーションタスクで、NMRが汎化挙動を予測し、ISSが既存の解釈手法より忠実な説明を与えると報告された。実機性能を直接上げる手法ではないが、VLAが背景や偶然相関に頼っていないかを事前診断する安全評価レイヤーとして重要性が高い。
7️⃣ シンガポールAV法制公開コンサル — 自律走行の責任・保険・サイバーを制度化へ
📎 出典:Singapore Ministry of Transport (Ministry of Transport)
シンガポール運輸省が、自律走行車の包括的な法制度設計に向けた公開コンサルテーションを2026年5月4日に開始した。対象は①AV技術主体・フリート運営者・車上安全オペレータ・遠隔オペレータの責任分界、②補償と保険、③データ・サイバーセキュリティ管理、④ADASと条件付自動運転における人間への引継ぎ責任の4領域。受付期限は2026年6月30日。フィジカルAIの社会実装では、事故時の責任・保険・事故調査用データ・サイバー攻撃時の補償まで整備できるかが配備速度を左右する。
8️⃣ Linkerbot — 高自由度ロボットハンド企業が次回60億ドル評価を目標
📎 出典:Reuters (Reuters)
Reutersは、中国のロボットハンド企業Linkerbotが次回資金調達で60億ドル評価を目指すと報じた。直近のSeries B+で30億ドル評価となり、高自由度ロボットハンドで世界シェア80%超、月産約5,000台から1万台への増産計画を示している。CEOは人間のスキルを標準化・再利用可能な形でロボットに変換するマルチモーダル基盤「LinkerSkillNet」(500超スキル収録)にも言及。既存ロボットアームに手だけ装着する需要があると説明した。次回ラウンドが私募かIPOか・時期や調達額は未確定で、「器用な手」が産業実装のボトルネックとして資本を集める構図が見える。
総合考察
2026/5/4の特徴は、フィジカルAIが研究室内のベンチマーク競争から、実世界での運用・改善・責任設計へ移行していることを強く示していました。LWDは失敗や人間介入を含む全軌跡を学習資産に変え、BeingH07は大規模動画知識を実機制御に接続する方向性を示した。一方、MSARNNや視覚ベース力覚は、大規模VLAだけに依存しない軽量・低コストな実装価値を提示している。MiniVLANavやEmbodied Interpretabilityは、言語汎化や失敗要因診断という評価基盤を補強する動きだ。さらに、AV法制やLinkerbotの評価額上昇は、ロボットの社会実装が技術性能だけでなく、責任、保険、サイバー、部品供給、資本投入の総合戦になっていることを物語る。
今後注目ポイント
実機フリートから得られる失敗軌跡や人間介入データを、どれだけ安全に再学習へ戻せるかが、VLAの実用性能差を決める重要指標になりそうだ。
世界モデルは高精細な未来画像生成よりも、制御に必要な潜在表現へ圧縮する方向が主流化し、実機ループで使える軽量性が評価軸になっていく。
大規模VLAの陰で、CPU推論可能なステレオ視覚制御やセンサレス力覚のような現場実装型技術が、短期の商用化を支える可能性が高い。
VLAの汎化失敗を事後分析するだけでなく、配備前に偶然相関や背景依存を検出する解釈評価レイヤーが、安全審査の一部になるかが注目される。
シンガポールのAV法制のように、責任分界、保険、事故データ、サイバー補償まで制度化できる国が、フィジカルAI配備の実験場を先取りする。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #2026年
- #シンガポール
- #サイバーセキュリティ
- #フィジカルAI
- #ロボティクス
- #ヒューマノイド
- #強化学習
- #AI最新情報
- #マルチモーダルAI
- #PhysicalAI
- #継続学習
- #2026年5月
- #VLA
- #保険制度
- #自律走行
- #産業ロボット
- #IsaacSIM
- #ロボットハンド
- #AgiBot
- #ロボット制御
- #ロボット投資
- #ロボット安全
- #実機学習
- #移動マニピュレータ
- #エゴセントリック動画
- #潜在世界モデル
- #低遅延制御
- #Linkerbot
- #フリート学習
- #実世界操作
- #LinkerSkillNet
- #高自由度ハンド
- #AV法制
- #汎化評価
- #因果解釈
- #EmbodiedInterpretability
- #言語条件付きナビゲーション
- #MiniVLANav
- #柔軟グリッパ
- #視覚ベース力覚
- #MSARNN
- #ステレオ視覚
- #BeingH07
- #LearningwhileDeploying




