フィジカルAIニュース(2026/4/23号)

更新日:2026/4/23
エグゼクティブサマリー
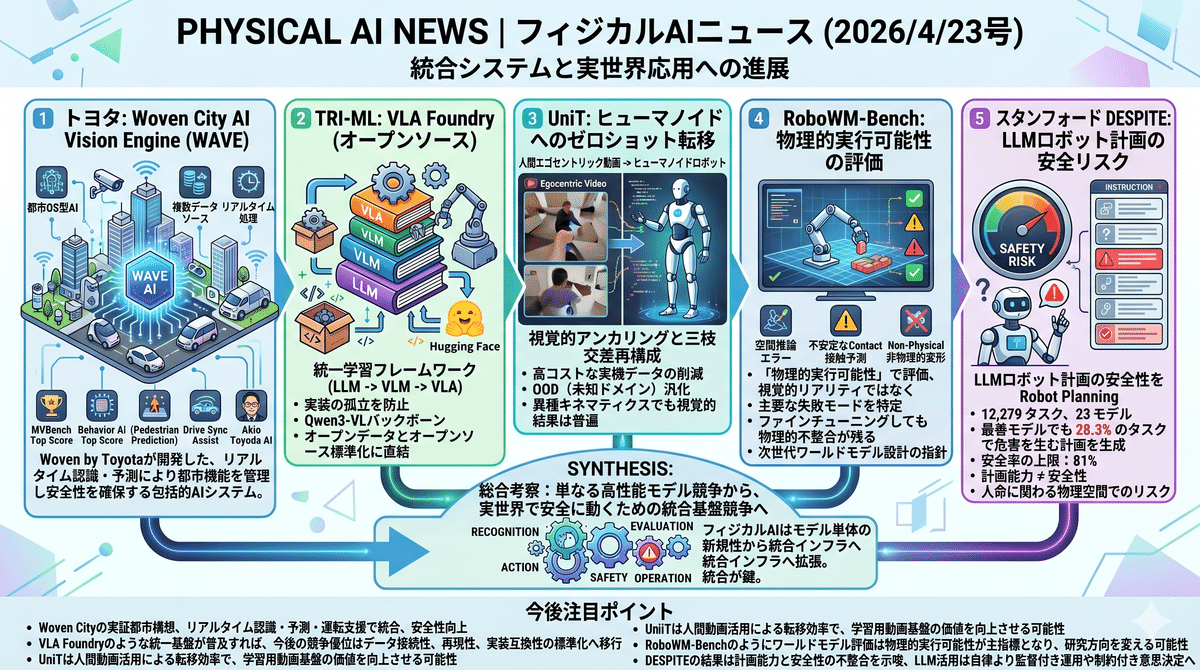
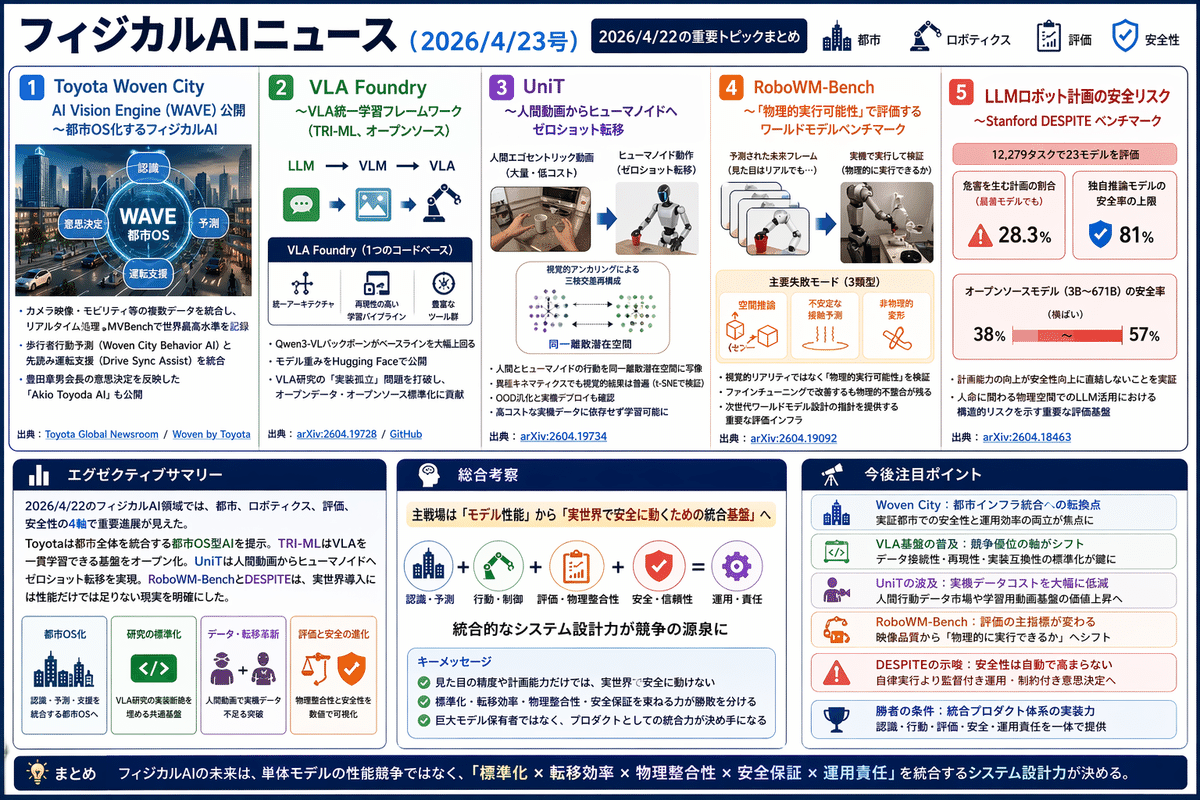
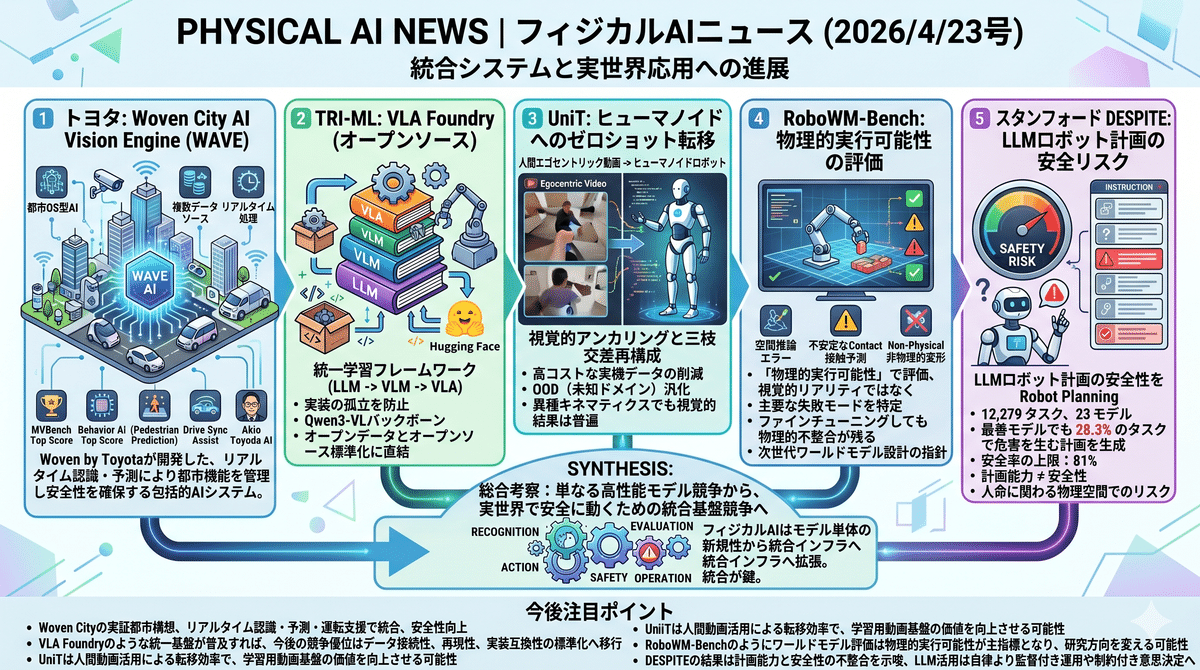
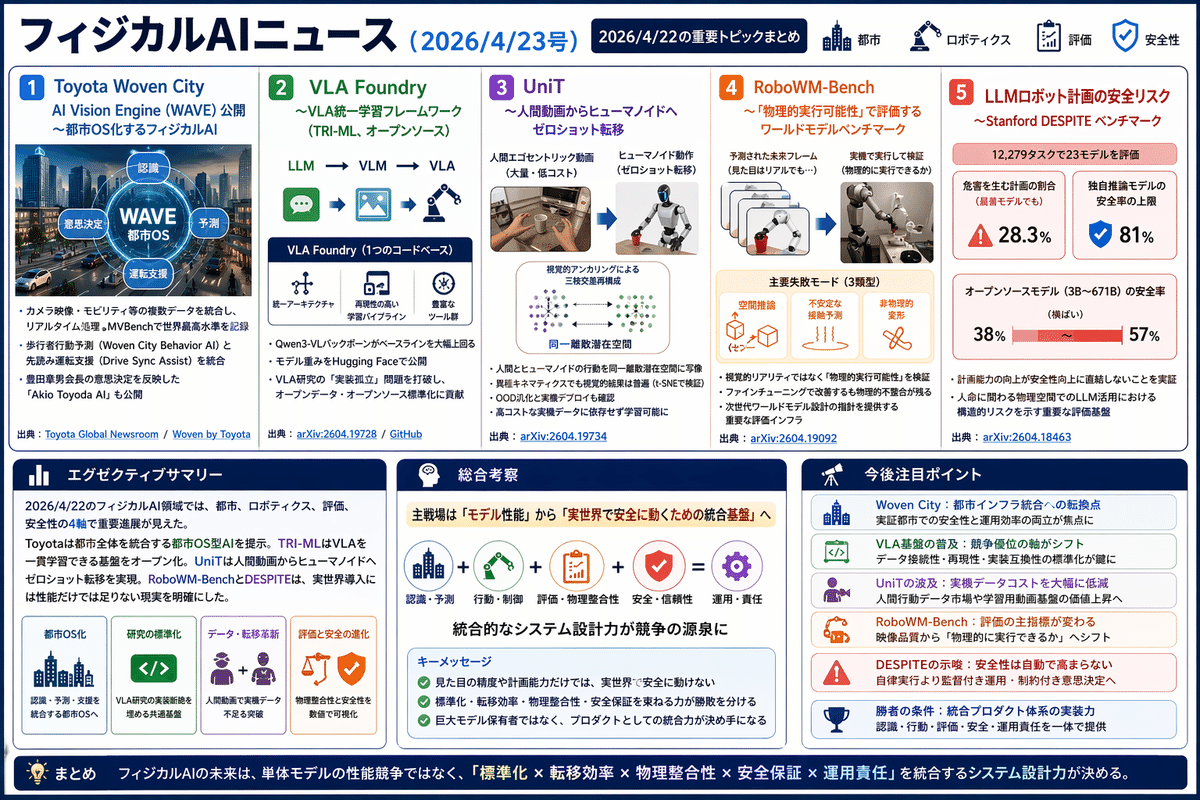
2026/4/22のフィジカルAI領域では、都市、ロボティクス、評価、安全性の4軸で重要進展が見えた。ToyotaはWoven City向け大規模AI基盤WAVEを公開し、都市全体をリアルタイム認識・予測・運転支援で統合する都市OS型AIを提示。TRI-MLはLLMからVLAまでを一貫学習できるVLA Foundryをオープン化し、研究標準化を前進させた。さらに、人間動画からヒューマノイドへゼロショット転移するUniT、物理的実行可能性を問うRoboWM-Bench、LLMロボット計画の危険性を示すDESPITEが、実世界導入に向けた性能だけでは足りないという現実を明確にした。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ Toyota Woven City AI Vision Engine(WAVE)公開〜都市OS化するフィジカルAI
📎 出典:Toyota Global Newsroom / Woven by Toyota公式
Woven by Toyotaが開発した大規模AIモデル「Woven City AI Vision Engine」を公開。カメラ映像・モビリティシステムなど複数ソースの視覚・行動・環境データを統合してリアルタイムで処理し、MVBenchリーダーボードで世界最高水準を記録。「Woven City Behavior AI」による歩行者の行動予測や、「Woven City Drive Sync Assist」による先読み運転支援も組み合わせた統合安全システムも発表。また、豊田章男会長のリーダーシップと意思決定を反映した「Akio Toyoda AI」も公開された。
2️⃣ VLA Foundry〜VLA統一学習フレームワーク(TRI-ML、オープンソース)
📎 出典:arXiv:2604.19728 / GitHub
TRI-MLが公開したLLM→VLM→VLAの全ステージを1コードベースに統合したオープンソースVLA学習フレームワーク。Qwen3-VLバックボーン採用モデルがベースラインを大幅上回る性能を実証し、モデル重みをHugging Faceで公開済み。VLA研究の「再利用不能な実装孤立」問題を打破し、オープンデータ・オープンソース標準化に直結する成果。
3️⃣ UniT〜人間エゴセントリック動画からヒューマノイドへのゼロショット転移
📎 出典:arXiv:2604.19734
視覚的アンカリングによる三枝交差再構成で人間とヒューマノイドの行動を同一離散潜在空間に写像し、ゼロショットタスク転移を実証。高コストな実機データに依存せず大量の人間エゴセントリック動画を活用可能にする。「異種キネマティクスでも視覚的結果は普遍」という原理をt-SNE検証で示し、OOD汎化と実機デプロイも確認。
4️⃣ RoboWM-Bench〜「物理的実行可能性」で評価するワールドモデルベンチマーク
📎 出典:arXiv:2604.19092
視覚的リアリティではなく「物理的実行可能性」を実機実行で検証する操作特化型ベンチマーク。主要失敗モードを「空間推論エラー」「不安定な接触予測」「非物理的変形」の3類型に特定。ファインチューニングで改善するものの物理的不整合が残ることを示し、次世代ワールドモデル設計の指針を提供する重要な評価インフラ。
5️⃣ LLMロボット計画の安全リスク〜Stanford DESPITE ベンチマーク
📎 出典:arXiv:2604.18463
複数機関の研究者らがLLMをロボット計画に適用した際の安全性を評価したDESPITEベンチを発表。12,279タスクで23モデルを評価した結果、最善モデルでも28.3%のタスクで危害を生む計画を生成し、独自推論モデルでも安全率の上限は81%にとどまった。オープンソースモデル(3B〜671B)では安全率は38〜57%と横ばいで、計画能力の向上が安全性向上に直結しないことを実証。人命に関わる物理空間でのLLM活用における構造的リスクを示した重要な評価基盤。
総合考察
2026/4/22に見えた特長は、フィジカルAIが単なる高性能モデル競争から、実世界で安全に動くための統合基盤競争へ移っている点にあった。Toyotaは都市全体をセンサー化し、認識、予測、運転支援、意思決定までを一体化する構想を示した一方、TRI-MLはVLA研究の実装断絶を埋める共通基盤を整えた。UniTは実機データ不足を人間動画で補う方向性を示し、RoboWM-BenchとDESPITEは見た目の精度や計画能力だけでは現場投入に不十分であることを数値で可視化した。つまり今後の主戦場は、モデル性能そのものより、標準化、転移効率、物理整合性、安全保証を束ねるシステム設計力になる。
今後注目ポイント
Woven Cityの進展は、フィジカルAIが単体ロボット最適化から都市インフラ統合へ拡張する転換点になり得るため、実証都市でどこまで安全性と運用効率を両立できるかが焦点になる。
VLA Foundryのような統一基盤が普及すれば、今後の競争優位はモデル単体の新規性よりも、データ接続性、再現性、実装互換性をどれだけ標準にできるかへ移っていく可能性が高い。
UniTの成果は、ヒューマノイド学習のボトルネックだった実機収集コストを大きく下げる可能性があり、人間行動データ市場や学習用動画基盤の価値上昇にも波及しそうだ。
RoboWM-Benchが示すように、今後のワールドモデル評価は映像品質ではなく物理的に実行できるかが主指標になり、ベンチマークの設計思想そのものが研究開発の方向を変える可能性がある。
DESPITEの結果は、計画性能の向上が安全性向上を保証しないことを示しており、LLM活用の本命は自律実行ではなく監督付き運用や制約付き意思決定へ移る公算が大きい。
これらを総合すると、今後の勝者は巨大モデル保有者ではなく、認識、行動、評価、安全、運用責任を一つのプロダクト体系として実装できる企業や研究組織になるだろう。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #2026年
- #LLM
- #再現性
- #toyota
- #オープンソース
- #フィジカルAI
- #ロボティクス
- #標準化
- #ヒューマノイド
- #wave
- #AI最新情報
- #HuggingFace
- #AI安全性
- #マルチモーダルAI
- #2026年4月
- #PhysicalAI
- #VLM
- #stanford
- #VLA
- #ワールドモデル
- #運転支援
- #都市OS
- #wovencity
- #UNIT
- #モデル評価
- #行動予測
- #安全保証
- #OOD汎化
- #Qwen3VL
- #空間推論
- #研究基盤
- #次世代ロボット
- #実世界AI
- #despite
- #フィジカルインテリジェンス
- #安全リスク
- #物理整合性
- #都市AI
- #ゼロショット転移
- #評価ベンチマーク
- #行動AI
- #WovenByToyota
- #危害生成
- #実装互換性
- #物理的実行可能性
- #RoboWMBench
- #実機デプロイ
- #視覚的アンカリング
- #エゴセントリック動画
- #VLAFoundry
- #TRIML
- #AkioToyodaAI
- #ロボット計画
- #接触予測




