フィジカルAIニュース(2026/4/3号)

更新日:2026/4/3
エグゼクティブサマリー
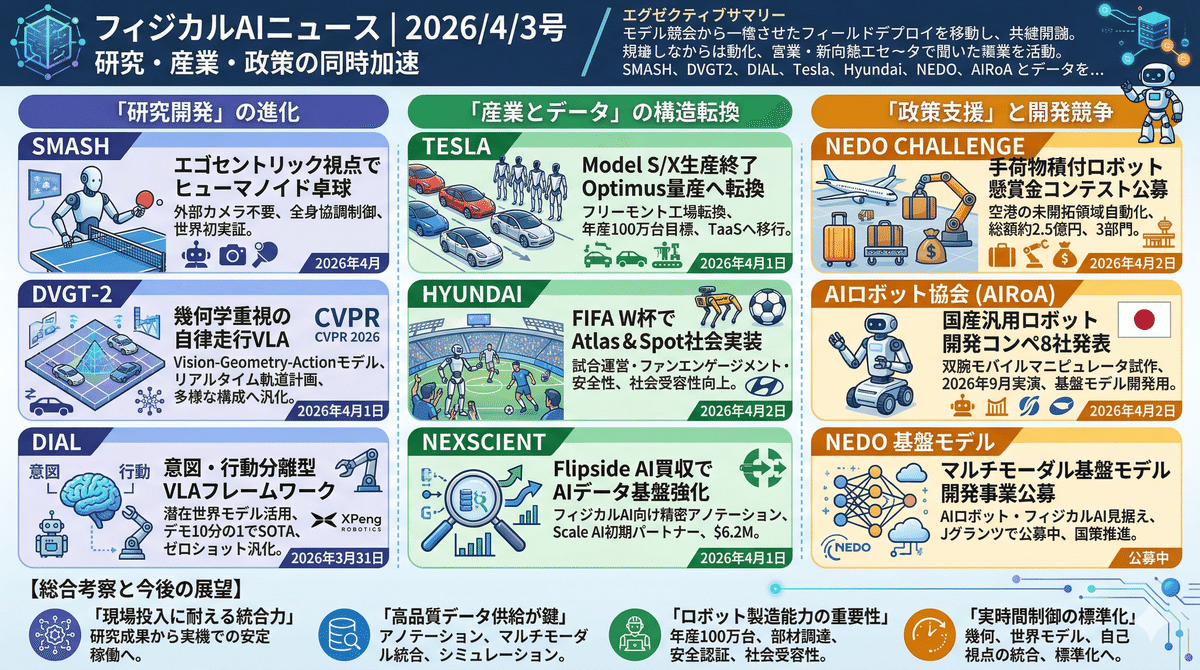
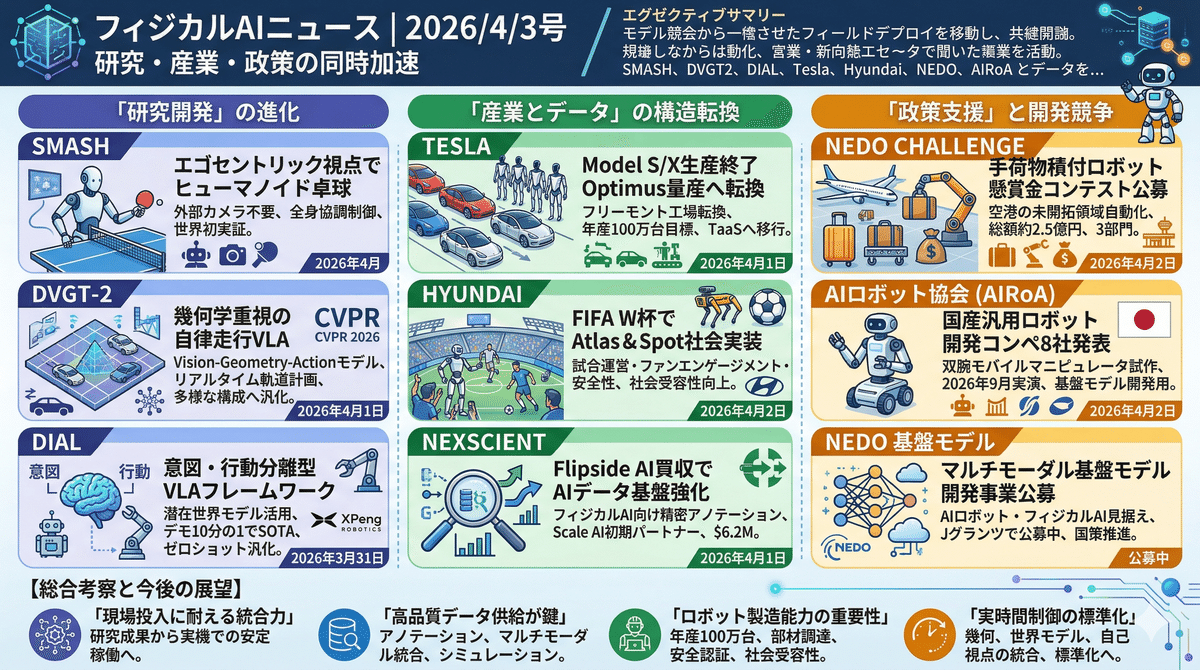
2026/4/2のフィジカルAIは、研究・産業・政策が同時に加速していることが見えた。研究面では、SMASHが外部カメラなしのエゴセントリック視点でヒューマノイド卓球を実証し、DVGT2とDIALが自律走行・ロボット制御で幾何理解や意図分離を軸にVLAの実用化を前進させた。産業面では、TeslaがModel S/Xを終息しOptimus量産へ資源転換、HyundaiはFIFA W杯でAtlasとSpotを社会実装フェーズへ押し出した。国内ではNEDOやAIRoAが公募・競争型支援を拡大し、データ基盤ではNexscientによるFlipside AI買収が進み、学習、量産、実装、データ整備が一体で進む構図が鮮明になっている。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ SMASH:エゴセントリック視点でヒューマノイドが卓球をマスター
📎 出典URL:https://arxiv.org/abs/2604.01158
ヒューマノイドロボットが外部カメラ不要・自己搭載エゴセントリックビジョンのみで卓球の全身スキルを習得するモジュラーシステム「SMASH」が2026年4月に発表された。スマッシュや低姿勢ショットを含む多様な打球動作を生成モデルで拡充・多様化し、従来の上下半身分離制御ではなく統合的な全身協調制御を実現している点が新規性。低遅延知覚・自己運動による不安定性・限られた視野といった課題を克服し、オンボードセンサのみを用いたヒューマノイドによる連続打球を世界で初めて実証した。動的なヒューマノイドインタラクションタスクに向けたスケーラブルな知覚駆動型全身スキル学習を検証した。
2️⃣ テスラがModel S/X生産終了・Optimus年産100万台量産ラインへ転換
🚗➡️🤖 歴史的転換点
📎 出典URL:https://electrek.co/2026/04/01/tesla-model-s-x-production-over-only-inventory-left/
テスラは2026年4月1日、フラッグシップEV「Model S」「Model X」のカスタム注文を正式終了し、14年間の生産に幕を下ろした。世界在庫は約600台(Model S約295台・Model X約301台)のみが残る状況。イーロン・マスクCEOはX上で終了を発表し、フリーモント工場の生産ラインをヒューマノイドロボット「Optimus」製造へ転換すると表明。VP ラーズ・モラヴィは「輸送のサービス化(TaaS)」への移行方針を示した。2012年の量産開始以来、両モデルの累計納車台数は61万台超に達していた。
3️⃣ DVGT-2:自律走行スケールVision-Geometry-Actionモデル(CVPR 2026採択)
🚗 自律走行 × VLA の新定式化
📎 出典URL:https://arxiv.org/abs/2604.00813
自律走行に特化したVision-Geometry-Action(VGA)モデル「DVGT-2」が2026年4月1日にarXivで公開された(コードあり)。従来のVLAが言語記述を補助タスクとするのに対し、密な3D幾何情報を意思決定の中核に据える点が新規性。ストリーミング処理とスライディングウィンドウ戦略により、オンライン推論とリアルタイム軌道計画を両立。同一モデルをファインチューニングなしで多様なカメラ構成・複数ベンチマーク(NAVSIM・nuScenes)に直接適用できる汎化性能も実証されている。
4️⃣ DIAL:潜在世界モデルによる意図・行動分離型 End-to-End VLA
🧠 VLA の解釈性・汎化性を向上
📎 出典URL:https://arxiv.org/abs/2603.29844
潜在世界モデルを活用して「意図(Intent)」と「行動(Action)」を明示的に分離するEnd-to-End VLAフレームワーク「DIAL」が2026年3月31日にarXivで発表された(XPeng Robotics、プロジェクトページあり)。VLMベースのSystem-2が潜在的な視覚予測で意図をボトルネックとして符号化し、軽量なSystem-1がそれを実ロボット行動に変換する2段階構造が新規性。RoboCasa GR1ベンチマークで従来比デモ10分の1でSOTAを達成し、ヒューマノイドロボットへの実世界展開でも未見オブジェクトへのゼロショット汎化を実証した。
5️⃣ NEDO「手荷物積付ロボット」懸賞金コンテスト公募開始(総額約2.5億円)
✈️ 空港グランドハンドリングの自動化へ
📎 出典URL:https://www.meti.go.jp/press/2026/04/20260402001/20260402001.html
経済産業省・NEDO・国土交通省は2026年4月2日、「NEDO Challenge, Baggage-Loading Robot~空港の未開拓領域に挑め~」の公募を開始した。空港グランドハンドリングにおける慢性的な人手不足と高負荷な手荷物積付作業の自動化を目的に、①手荷物識別(懸賞金総額1,500万円)、②積付アルゴリズム(同1,500万円・予定)、③積付ロボット(同2億2,000万円)の3部門でコンテストを実施。スタートアップ・研究機関・個人など幅広い参加が可能で、特定の空港設備との連携を前提としない点が特徴。
6️⃣ AIロボット協会:国産汎用ロボット(双腕モバイルマニピュレータ)開発コンペ採択企業8社発表
🦾 国内ロボット競争力の強化へ
📎 出典URL:https://prtimes.jp/main/html/rd/p/000000012.000158322.html
一般社団法人AIロボット協会(AIRoA)は2026年4月2日、NEDO委託事業として実施する「国産汎用ロボット開発コンペティション」の採択企業8社(Enactic、EmplifAI、Keigan、THK、Telexistence、HatsuMUV、不二越、ugo)を発表した。各社は約6ヶ月間で双腕モバイルマニピュレーターの試作機を開発し、2026年9月中旬に都内で実演イベントを開催予定。評価基準を満たした試作機はNEDO委託のロボティクス分野生成AI基盤モデル開発向けデータ収集用ロボットとして、2027年7月以降に量産機の納入・活用が始まる見込みだ。
7️⃣ NEDOマルチモーダル基盤モデル開発事業(公募中・締切4/22)
📎 出典URL:https://www.jgrants-portal.go.jp/subsidy/a0WJ200000CDY3BMAX
国立研究開発法人NEDOは、「AIロボット・フィジカルAIを見据えたマルチモーダル基盤モデル開発事業」(制度番号:P26013)の実施者公募をJグランツで開始した。対象業種は学術研究・専門技術サービス業で、従業員数制限はなく研究開発・実証事業を目的とする機関が対象。補助上限額や公募期間等の詳細はNEDO公式HP(koubo/CD2_100431)に掲載されており、日本国内におけるロボティクス分野の生成AI基盤モデル整備を国策として推進する動きの一環と位置づけられる。
8️⃣ NexscientによるFlipside AI買収($6.2M):フィジカルAIデータ基盤強化
📊 物理AIの「データ問題」に挑む
📎 出典URL:https://www.finanznachrichten.de/nachrichten-2026-04/68107083-nexscient-inc-nexscient-acquires-flipside-ai-completing-a-dollar-6-2m-deal-to-expand-physical-ai-data-capabilities-200.htm
AIソリューション企業Nexscient(OTCQB:NXNT)は2026年4月1日、フィリピン拠点のAIデータエンジニアリング企業Flipside AIを総額約$6.2M(現金・転換社債・株式の組み合わせ)で完全買収したと発表した。Flipside AIはScale AIの最初期パートナーとして、VLAモデル・エンボディドAI向けの精密アノテーション・2D/3D・LiDAR・センサーフュージョンなど物理AIデータ基盤で実績を持つ。買収により両社の統合プラットフォームで企業・ロボティクスAI顧客向けのエンドツーエンドAIデータ供給体制を構築。FlipsideのCEO Anthony De LunaがNexscientのCTO兼取締役に就任した。
9️⃣ Hyundai「Next Starts Now」:FIFA W杯2026でBoston Dynamics Atlas & Spot初投入
⚽🤖 ロボットの社会認知向上へ
📎 出典URL:https://www.kyodo.co.jp/pr/2026-04-02_4003224/
現代自動車(Hyundai Motor)は2026年4月2日、ニューヨーク国際自動車ショーでFIFAワールドカップ2026™向けグローバルキャンペーン「Next Starts Now(未来が今始まる)」を発表した。Boston DynamicsのヒューマノイドロボットAtlas®と四足歩行ロボットSpot®を指定会場に展開し、試合運営・ファンエンゲージメント・安全性強化に活用。韓国代表キャプテンのソン・フンミン選手をグローバルアンバサダーに起用し、AtlasとともにYouTubeでキャンペーン動画も公開された。FIFAとの27年にわたるパートナーシップを拡張する取り組みだ。
総合考察
2026/4/2は、フィジカルAIが「モデル性能競争」から「現場投入に耐える統合力競争」へ移っているところが特長として見られました。SMASHは知覚と全身制御の同時最適化、DVGT2は言語偏重から幾何中心への再定義、DIALは意図と行動の分離による解釈性と少量データ学習を示し、アルゴリズムは着実に実機志向へ向かっている。一方でTesla、Hyundai、NEDO、AIRoAの動きは、量産設備、競争的資金、評価機会、社会認知の整備が技術と同じくらい重要になったことを示す。さらにNexscientの買収は、勝敗を分けるのがモデル単体ではなく、高品質データの収集、統合、供給能力であることを裏づけており、今後は研究成果を産業基盤へ接続できる陣営が主導権を握りやすい。
今後注目ポイント
フィジカルAIの次の勝負所は、言語中心のVLAから、幾何、世界モデル、自己視点知覚を統合した実時間制御へ移る流れがどこまで標準化するかにある。研究新規性より、実機で壊れず動く設計思想が評価軸になる。
Teslaのライン転換は、ヒューマノイドが研究開発テーマではなく生産設備を奪い合う事業領域に入ったことを示す。年産目標の実現性だけでなく、部材調達、歩留まり、安全認証まで含めた製造能力が問われる。
日本ではNEDOやAIRoAを軸に、公募、懸賞金、試作、量産導入までをつなぐ政策導線が見え始めた。単発支援で終わらず、共通評価基盤とデータ共有基盤まで整備できるかが競争力を左右する。
データ基盤の重要性はさらに増す見込みで、今後は高精度アノテーション、マルチモーダル統合、シミュレーション連携を握る企業が、ロボット本体メーカーや基盤モデル開発企業に対して強い交渉力を持つ可能性が高い。
HyundaiのW杯展開は、ロボットの社会受容性を一気に押し上げる実証機会になり得る。産業現場だけでなく、イベント運営や公共空間での安全運用実績が、次の需要創出と規制整備を後押ししそうだ。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #2026年
- #tesla
- #ロボティクス
- #フィジカルAI
- #ヒューマノイド
- #社会実装
- #Atlas
- #AI最新情報
- #Lidar
- #PhysicalAI
- #OPTIMUS
- #NEDO
- #SMASH
- #HYUNDAI
- #VLA
- #SPOT
- #グランドハンドリング
- #bostondynamics
- #2026年4月
- #エンボディドAI
- #自律走行
- #センサーフュージョン
- #models
- #軌道計画
- #FIFAワールドカップ2026
- #ModelX
- #TaaS
- #ロボット量産
- #AIRoA
- #DIAL
- #実世界AI
- #CVPR2026
- #AIデータ基盤
- #生成AI基盤モデル
- #卓球ロボット
- #Nexscient
- #ゼロショット汎化
- #ロボットデータ
- #全身協調制御
- #エゴセントリックビジョン
- #DVGT2
- #幾何理解
- #潜在世界モデル
- #意図分離
- #手荷物積付ロボット
- #双腕モバイルマニピュレータ
- #国産汎用ロボット
- #マルチモーダル基盤モデル
- #FlipsideAI




