Wiggle and Go! System Identification for Zero-Shot Dynamic Rope Manipulation
arXiv cs.AI / 4/27/2026
📰 NewsSignals & Early TrendsIdeas & Deep AnalysisModels & Research
Key Points
- The paper proposes “Wiggle and Go!”, a two-stage system-identification framework for zero-shot dynamic rope manipulation in real robotic tasks.
- Instead of needing large real-world rope datasets or trial-and-error task iterations, the approach learns simulation priors and uses observed rope motion to predict descriptive physical parameters.
- Those inferred system parameters then condition an optimization method that generates goal-conditioned robot actions to perform tasks without retraining for each new goal.
- The method supports multiple dynamic rope manipulation tasks by using a single task-agnostic system-identification module, enabling seamless switching between policies.
- Experiments report improved accuracy for 3D target striking in the real world (3.55 cm vs. 15.34 cm without parameter-informed task modeling) and high agreement in rope dynamics (Pearson correlation 0.95 for Fourier frequency spectra on an unseen trajectory).
Related Articles

Subagents: The Building Block of Agentic AI
Dev.to
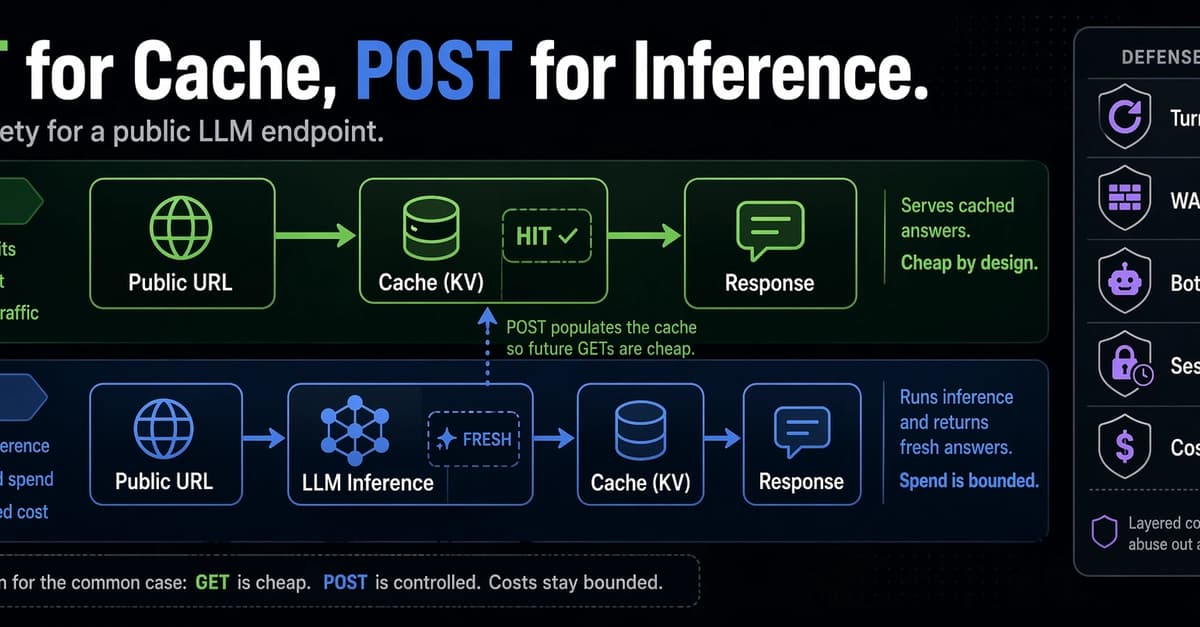
GET Serves Cache, POST Runs Inference: Cost Safety for a Public LLM Endpoint
Dev.to

DeepSeek-V4 Models Could Change Global AI Race
AI Business

Got OpenAI's privacy filter model running on-device via ExecuTorch
Reddit r/LocalLLaMA

The Agent-Skill Illusion: Why Prompt-Based Control Fails in Multi-Agent Business Consulting Systems
Dev.to