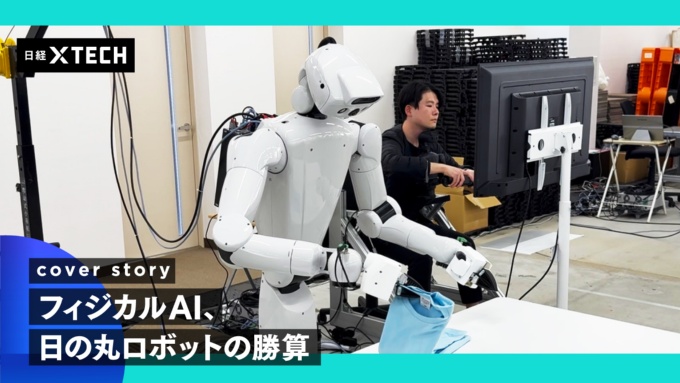
この記事の3つのポイント
- 中国に出遅れた日本、部品供給網で「1週間半」の差
- 中核的な部品技術に勝機、業界横断で課題を共有
- 人型ロボを導入したい企業は4割超、「幻滅期」に注意
フィジカルAI(人工知能)活用の代表格とも言えるのが人型ロボットだ。米国や中国で盛り上がりを見せる一方、かつて世界をリードした日本の影はいまや薄い。だが、手をこまぬいているわけではない。独自のAI開発や、高い技術力を持つ部品産業の市場参入促進で巻き返そうとの動きが活発化している。
AIの学習量、部品の供給網の両面で勝る中国
人型ロボットにおける中国の成長は著しい。例えば、2025年に日本法人も立ち上げた智元機器人(AgiBot、エージーアイボット)は、出荷台数ベースで世界首位を記録、2026年3月には人型ロボットの累計生産台数が1万台に達したと発表した。
エージーアイボットの強みは、ロボットを動かすAIも自前で構築する点だ。同社は、大規模言語モデル(LLM)と画像情報からロボットの行動を生成するVLA(Vision-Language-Action)モデル構築に向け、人間がロボットに動作を覚えさせる学習拠点を持つ。実際に同社からデータセットを直接購入したロボット関係者は、「現場を視察したが、約10拠点で8時間2交代制のデータ収集体制に驚かされた。とんでもなくデータが増えている」と明かす。

ハードウエア面でも、中国にはドローン産業を背景に構築された部品供給網がある。人型ロボットなどを開発するアールティ(東京・千代田)代表取締役の中川友紀子氏は、社内で四足歩行ロボットの試作をゼロから始めて歩行させるまで「4週間半を要した」と振り返る。もし中国の新興企業が同じことをした場合、中川氏は「3週間で作り上げるだろう」と見る。この1週間半の差が、日本と中国の部品供給網の差だと指摘する。
日本でも学習データを収集、方法に工夫も
人型ロボットで出遅れている日本。強い危機感を抱く業界団体や企業は、巻き返しに打って出た。ロボット制御に使う基盤モデルの構築に乗り出すのは、NECやKDDIなどが正会員として名を連ねるAIロボット協会(AIRoA)だ。トヨタ自動車の生活支援ロボット「HSR」を活用して約7万時間のデータを集める。同協会理事で東京大学大学院工学系研究科教授の松尾豊氏は、「ハードやタスクの種類など、データの質も高めたい」と意気込む。
効率的な学習で追いかける企業も現れた。日立製作所は、学習時に成功したロボットの自己動作データを、次の学習に引き継がせる「継続学習」という技術を開発した。人がロボットを動かして直接動作を学ばせる模倣学習の過程に、ロボット側から補正する最適制御を組み込む。同社のロボティクス研究部で主任研究員を務める山田弘幸氏は、「少ない反復訓練で自律的な作業を実現できる」と説明する。
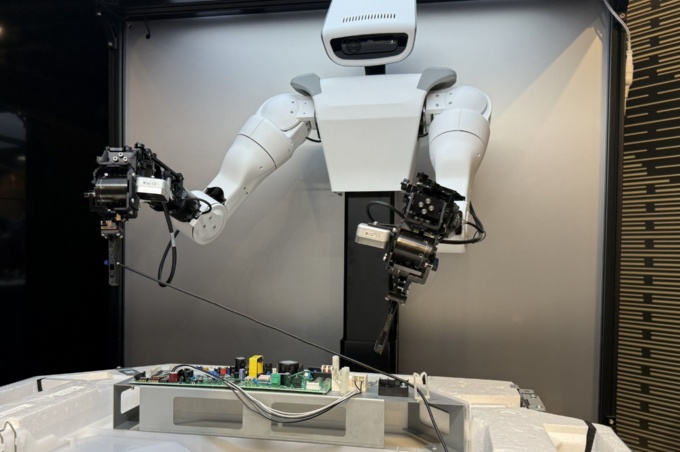
例えば「ケーブルの敷設作業」の場合、まず30~50回ほど人間が動作を繰り返して、ロボットに基本動作を学ばせる。この一連の学習は3時間ほど要する上に、この段階ではロボットの動作速度も遅い。ただし、成功したデータは2周目、3周目と次のAIの学習工程に引き継げる。すると、1周目で3時間かかった学習も、3周目では微修正にとどまり、40分ほどで完了する。
つまり、反復訓練する過程で、AI側からも最適化しながら自身を鍛えるイメージだ。継続学習を通じて、当初は約50秒を要したケーブルの敷設作業が、3周目なら10秒程度で作業を終えた。この仕組みを応用すれば、より少ない学習時間で人型ロボットを現場導入できる。
次のページ
無念をバネに、ハード側でも動きこの記事は有料会員限定です