フィジカルAIニュース(2026/4/6号)

更新日:2026/4/6
エグゼクティブサマリー
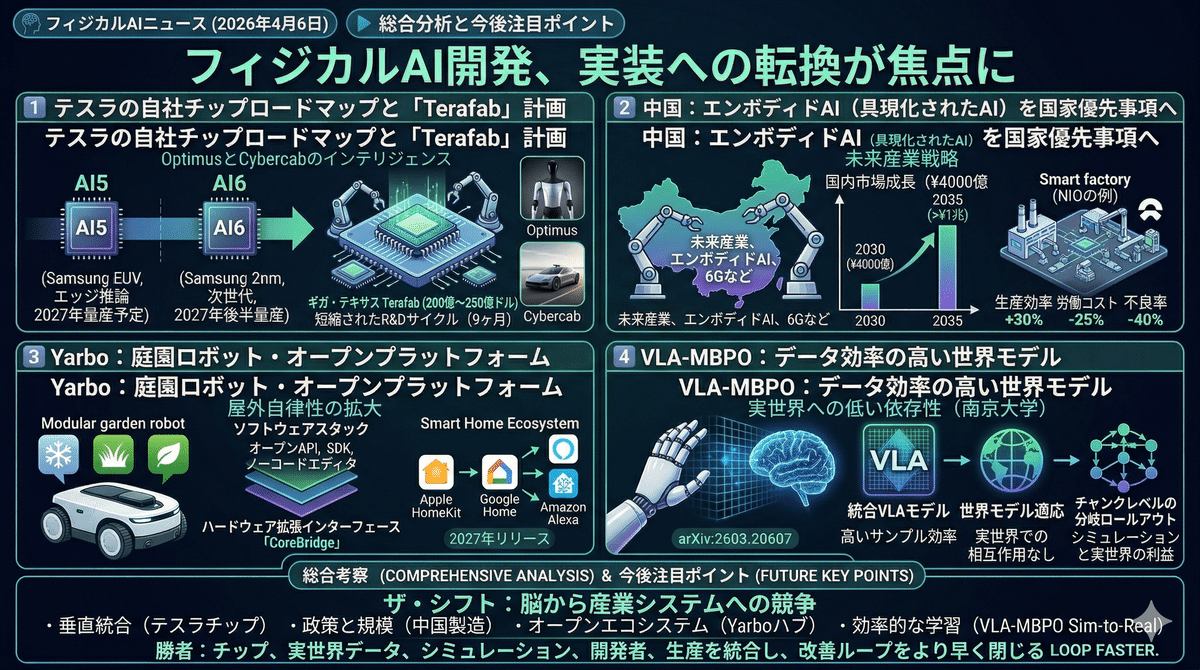
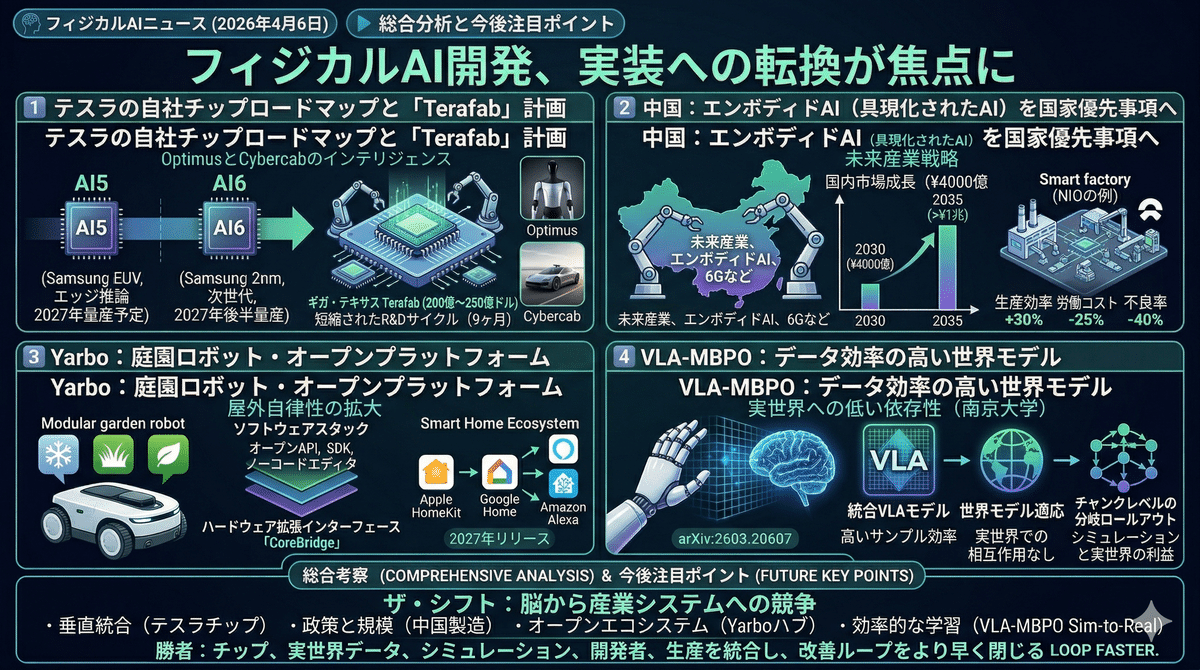
2026/4/5のフィジカルAIニュースは、知能モデル単体の競争から、半導体、国家投資、家庭向けプラットフォーム、学習基盤までを含む「実装力」の競争へ主戦場が移ったことを示している。テスラはAI5、AI6とTerafab構想で計算資源の内製化を進め、中国はEmbodied AIを国家成長戦略へ格上げし、Yarboは屋外ロボットをオープンプラットフォーム化、研究面ではVLA MBPOが実機依存を抑える学習法を提示した。フィジカルAIは、作る技術よりも、量産し学習し展開し続ける総合力が勝敗を決める段階に入りつつある。
※作成した記事内容をGammaに入力しスライド自動作成させました。スライドの方が見やすいようでしたらこちらをご覧くださいませ。
1️⃣ テスラがAI5/AI6チップロードマップと「Terafab」計画を公開
📎 出典:Tesla's Chip Roadmap: AI5, AI6, and Terafab Explained – basenor
テスラは2026年4月4日、ロボット「Optimus」と自律走行車「Cybercab」の知能をハードウェアレベルで強化する自社チップのロードマップを公開した。AI5(Samsung EUV製造・2027年量産予定)はOptimus・Cybercab向けエッジ推論特化チップ、AI6(Samsung 2nm・2026年12月テープアウト・2027年後半量産)は車両・ロボット・大規模AIトレーニングに対応する次世代チップ。従来12〜18ヶ月を要したチップ開発サイクルを9ヶ月に短縮する専用R&Dファブ、および200〜250億ドル規模のTerafab(テキサス州オースティン)計画も並行して推進している。
2️⃣ 中国がEmbodied AI(受肉したAI)を国家最優先成長エンジンに格上げ
📎 出典:Embodied AI turned into China's growth driver – Asia News Network
中国政府は2026年度の政府活動報告で、Embodied AI・次世代エネルギー・量子技術・脳コンピューターインターフェース・6Gを「未来産業」と位置付け、投資促進メカニズムの整備を公約した。国家評議会発展研究センターは、中国国内のEmbodied AI市場が2030年までに4,000億元(約550億ドル)、2035年には1兆元超へ成長すると予測。NIOのスマート工場では、Embodied AI技術の導入により生産効率30%以上向上・労働コスト25%削減・不良率40%削減といった具体的成果がすでに出ている。
3️⃣ Yarboが庭用ロボットを「Yarbo Open Platform」としてオープン化
📎 出典:Yarbo Introduces Open Platform Strategy – 巴士的報, PR Newswire – Yarbo Open Platform
2026年4月3日、Yarboは屋外向けモジュラーロボット(除雪・芝刈り・落ち葉掃除等)のソフトウェア・ハードウェア仕様を開放する「Yarbo Open Platform」戦略を発表。2027年初頭リリース予定で、Open API・SDK・ノーコードのAutomation Editorの3層ソフトウェア構造と、ハードウェア拡張インターフェース「CoreBridge」を通じたサードパーティ製アタッチメント開発に対応。Home Assistant・Google Home・Amazon Alexaなどスマートホームエコシステムとの連携も実現し、屋外ロボットをより汎用的なホームデバイスへと拡張する方向性を示した。
4️⃣ VLA-MBPO:世界モデルで実機不要の行動学習を実現(arXiv)
📎 出典:awesome-daily-AI-arxiv – Embodied_AI.md(arXiv:2603.20607)
南京大学LAMDAラボが提案した「VLA-MBPO」(arXiv:2603.20607)は、Vision-Language-Action(VLA)モデルのファインチューニングを世界モデル内で行う実用的フレームワーク。統合マルチモーダルモデル(UMM)を世界モデルとして適応させ、「チャンクレベル分岐ロールアウト」でエラー蓄積を抑制しながら高いサンプル効率でロボットスキルを学習できる。実機インタラクション不要でシミュレーション・実世界タスク双方で性能向上を実証しており、実ロボットへのスケーラブルな展開に向けた堅牢性も確認されている。
総合考察
2026/4/5のトピックを通じて見えてくる特長は、フィジカルAIの競争軸が「賢いモデル」から「現実世界で継続的に動く産業システム」へ拡張している点です。テスラはチップと製造で垂直統合を深め、中国は政策、資本、工場データでスケール優位を狙い、Yarboは開放戦略で外部開発者を巻き込み、VLA MBPOは実機コストを減らして学習速度を引き上げる。それぞれ領域は異なるが、共通する本質は、計算資源、実世界データ、開発者基盤、シミュレーション環境をどう束ねるかにある。今後は性能比較より、誰が最も早く低コストで改善ループを回せるかが競争力の核心になる。
今後注目ポイント
テスラのAI5、AI6とTerafab構想は、ロボット性能そのものよりも、設計から量産までの改善サイクル短縮が本丸であり、半導体開発速度がロボット展開速度を左右する局面に入る可能性が高い。
中国のEmbodied AI強化は、単なる研究支援ではなく、工場、生産現場、政策金融を一体化した産業政策として機能しうるため、今後は論文数より実装密度と供給網支配力を見る必要がある。
Yarboのオープンプラットフォーム化は、家庭用ロボット市場でアプリ経済圏が成立するかを占う試金石であり、屋外作業ロボットがスマートホーム全体のハブへ進化する可能性を秘めている。
VLA MBPOのような世界モデル活用型学習が実用化すれば、実機で壊しながら学ぶ時代から、仮想環境で大半を学習し最後に現場適応する開発フローへ急速に移行することが考えられる。
今後の勝者は、単一の高性能モデルを持つ企業ではなく、チップ、実世界データ、シミュレーション、開発者参加、量産能力を一体化して改善ループを閉じられる企業や国家になる公算が大きい。
いいなと思ったら応援しよう!
- #AI
- #生成AI
- #2026年
- #テスラ
- #スマートホーム
- #フィジカルAI
- #Samsung
- #国家戦略
- #AI最新情報
- #中国政府
- #arxiv
- #PhysicalAI
- #2026年4月
- #世界モデル
- #googlehome
- #NIO
- #OPTIMUS
- #EUV
- #垂直統合
- #HomeAssistant
- #SDK
- #VLA
- #2nm
- #スマート工場
- #生産効率
- #embodiedaI
- #openapi
- #cybercab
- #Terafab
- #AmazonAlexa
- #未来産業
- #南京大学
- #ロボット量産
- #AI5
- #シミュレーション学習
- #AI6
- #半導体内製化
- #自社チップ
- #労働コスト削減
- #UMM
- #不良率削減
- #芝刈りロボット
- #LAMDAラボ
- #サンプル効率
- #実機不要学習
- #VLA_MBPO
- #ロボットプラットフォーム
- #CoreBridge
- #AutomationEditor
- #OpenPlatform
- #除雪ロボット
- #庭用ロボット
- #屋外ロボット
- #Yarbo
- #ロボット供給網
- #受肉したAI




